I/O-planer
| Beskrivelse |
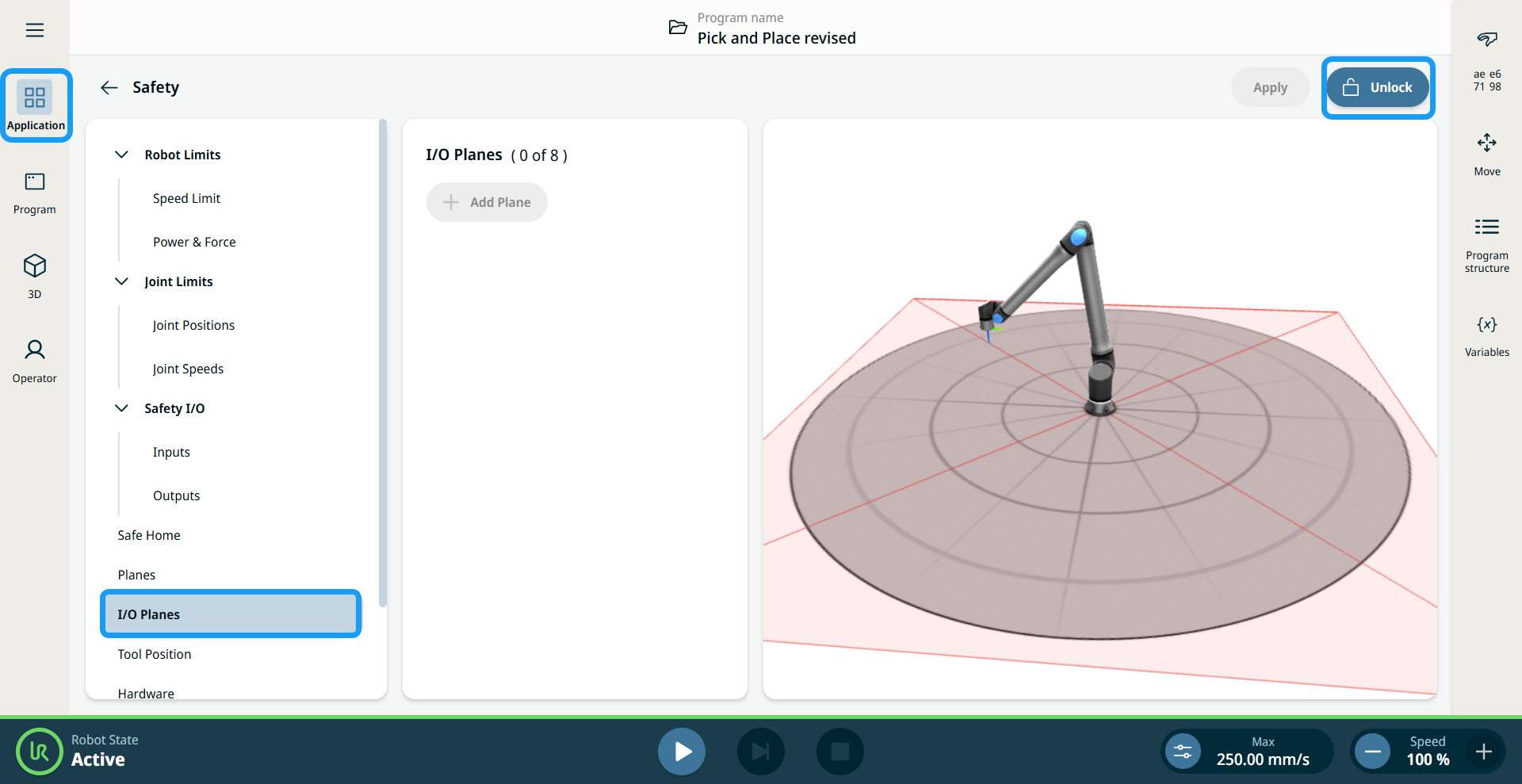
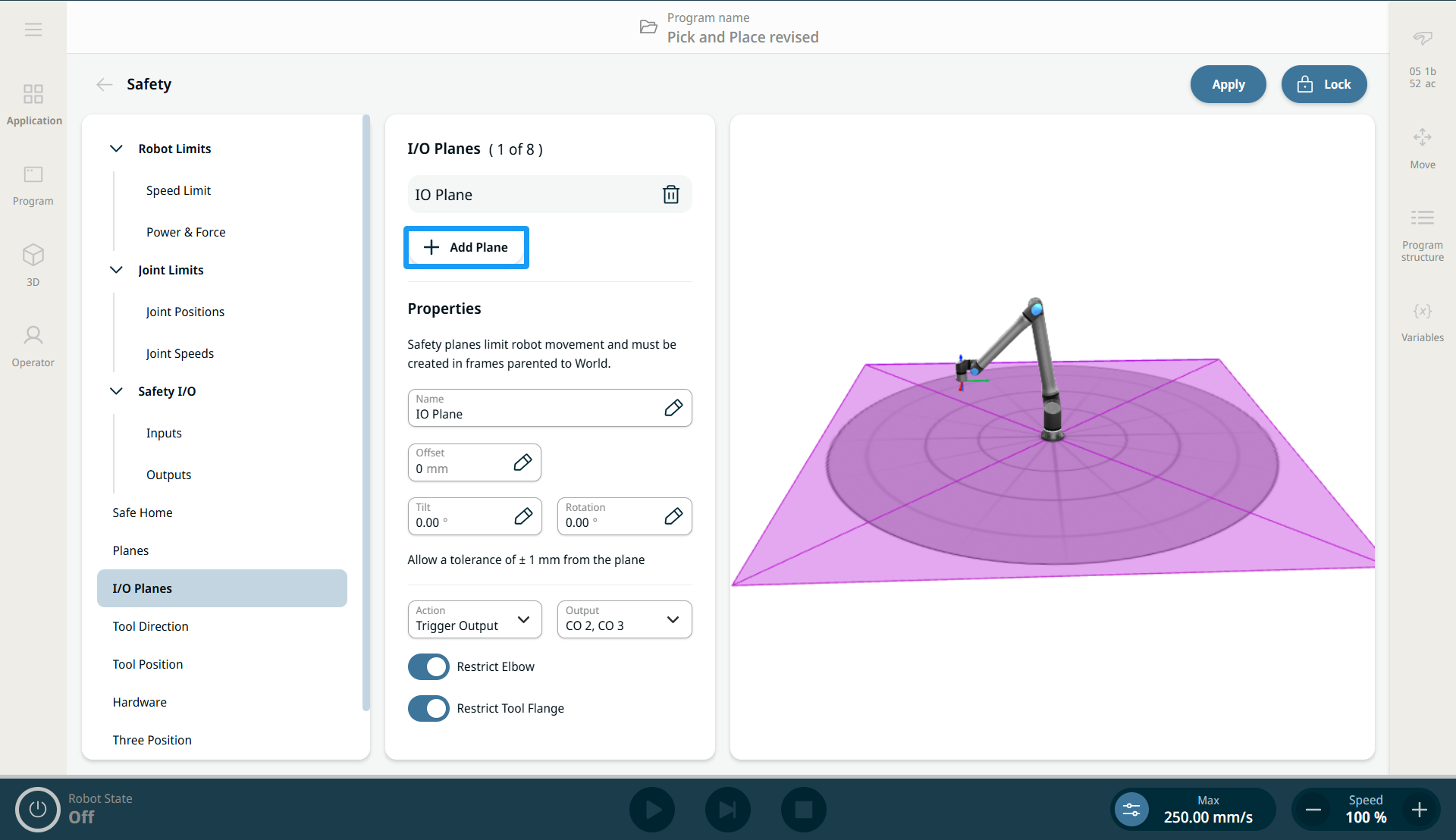
I/O Planes-funktionen giver mere fleksibel brug af sikkerhedsplaner sammenlignet med standarden Sikkerhedsplaner funktionalitet. Det giver dig mulighed for at aktivere og deaktivere sikkerhedsplaner ved hjælp af terminalindgange og/eller generere et udgangssignal, når sikkerhedskuglerne krydser et sikkerhedsplan.
|
|
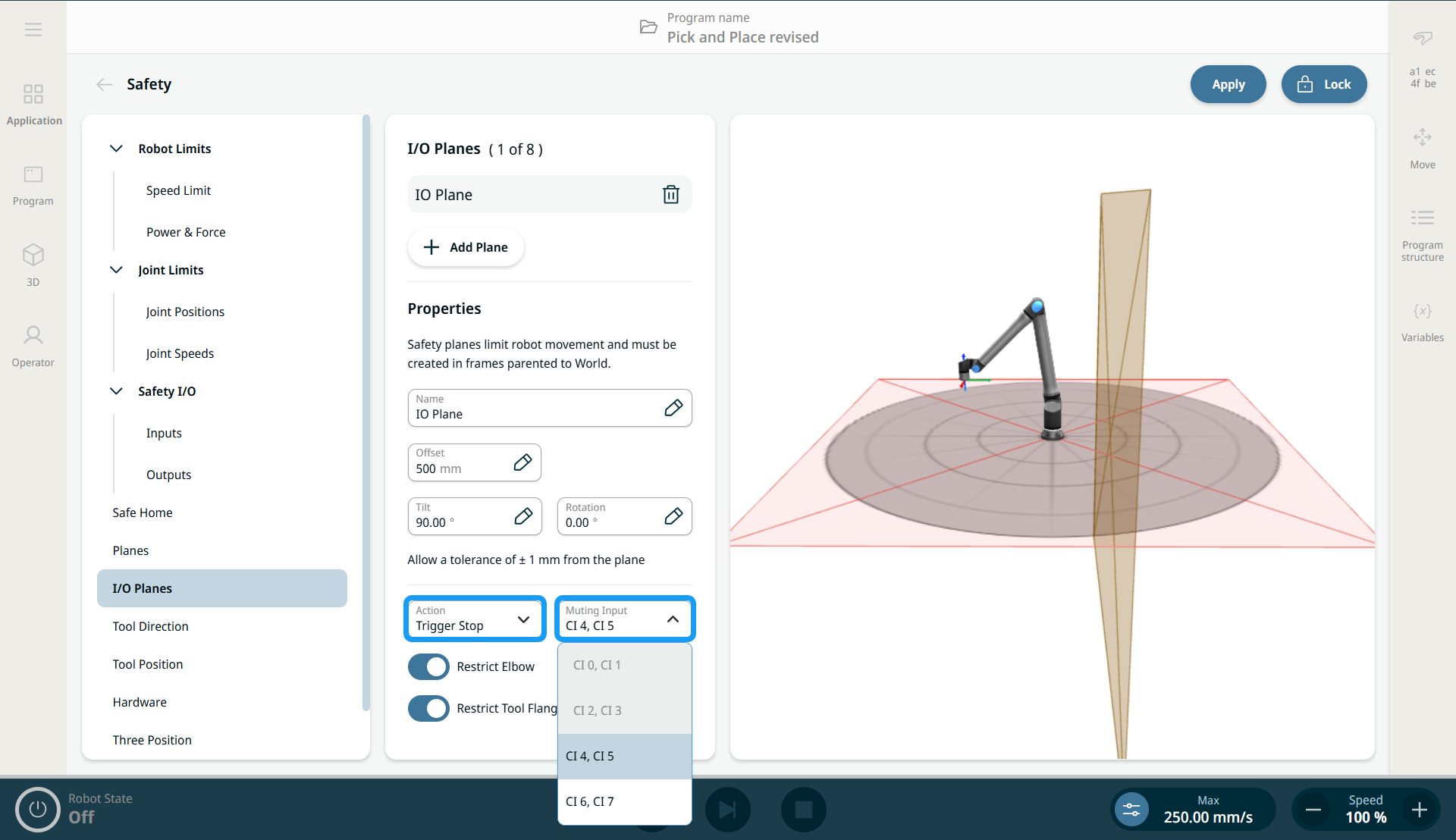
Input/Stop-plan |
Trigger Stop udløser et stop af I/O-planet. Den kan slås fra ved hjælp af en sikkerhedsindgang. Medmindre den er slået fra, får bevægelse mod flyet robotten til at stoppe og vente, indtil sikkerhedsindgangen slår flyet fra. Når planet er inaktivt, får robotten lov til at bevæge sig frit. Når flyet er aktivt, og robotten ikke har krydset flyet, vil robotten stoppe, før den krydser flyet. Hvis flyet aktiveres, mens robotten bevæger sig på kanten af flyet, kan robotten ende med at krydse flyet og vil i værste fald stoppe i henhold til de konfigurerede afstands- og stoptidsgrænser. Når flyet er aktiveret, og robotten har krydset flyet, stopper robotten i henhold til den konfigurerede stopafstand og stoptidsgrænser.
|
|
|
|
|
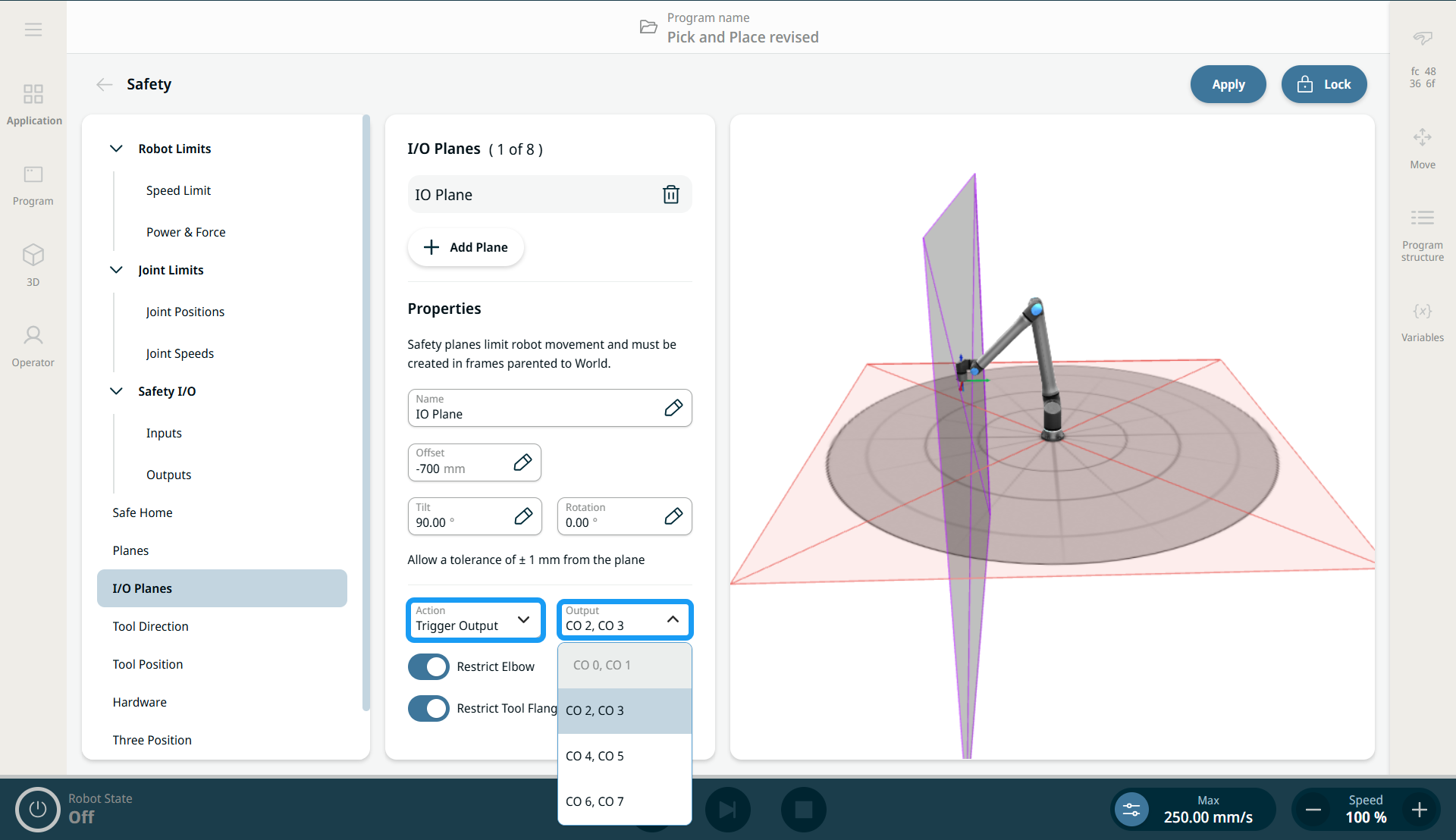
Udgangsplanet |
Udløseren genererer et sikkerhedsoutput baseret på, om en eller flere af sikkerhedskuglerne har krydset planet. Når en eller flere af sikkerhedskuglerne har krydset et plan, der er defineret som udløser, aktiveres den sikkerhedsudgang, der svarer til det pågældende plan. "Aktiveret" betyder, at sikkerhedsudgangene er elektrisk indstillet til "Lav". Når en af sikkerhedskuglerne har krydset et plan, der er defineret som udløser, aktiveres den sikkerhedsudgang, der svarer til det pågældende plan.
|