Sikkerhedsplan ved brug af en ramme
| Beskrivelse |
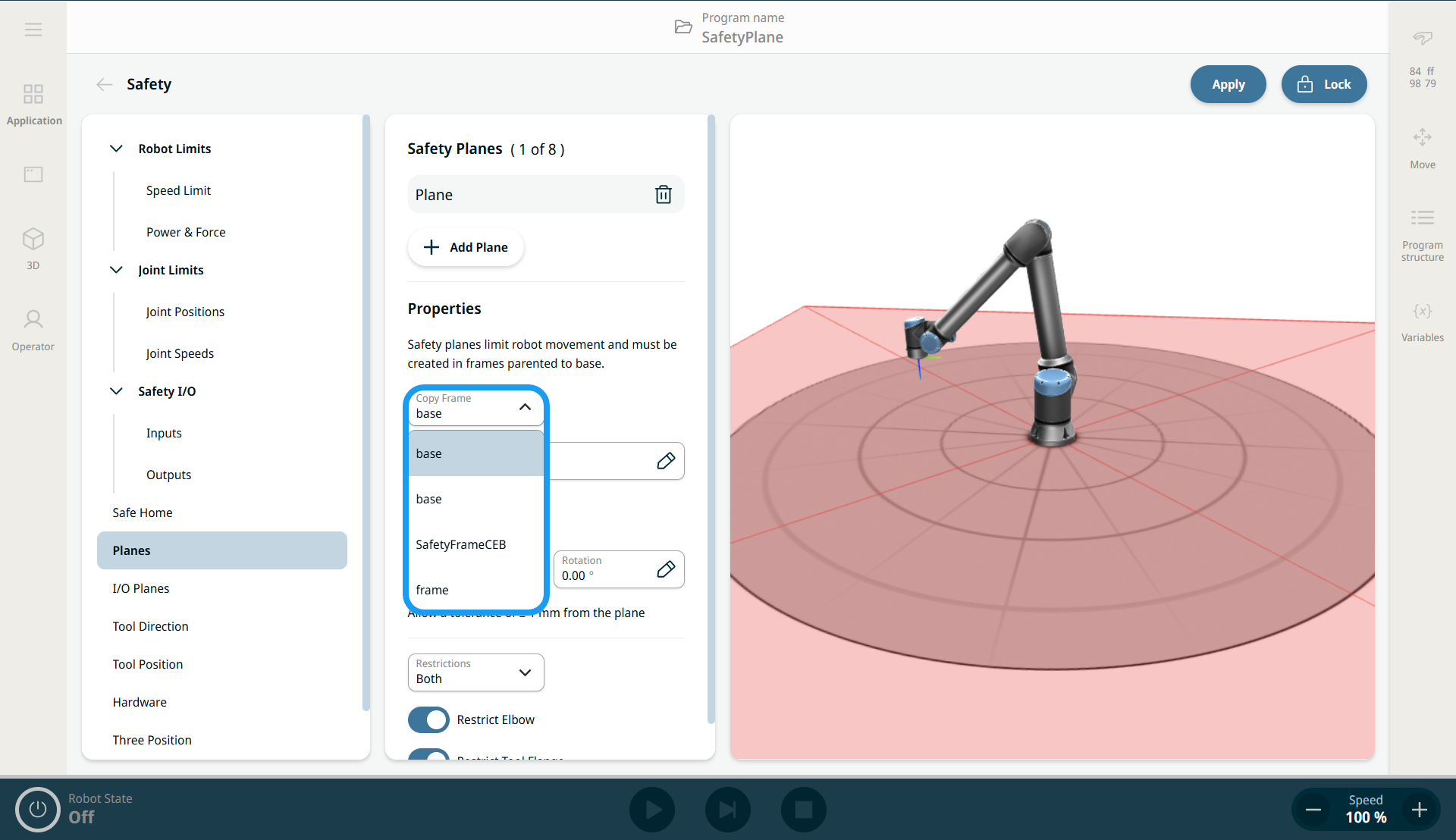
Du kan bruge en eksisterende ramme til at definere et sikkerhedsplan. Dette giver en mere intuitiv måde at angive planparametre ud fra en foruddefineret position og rotation (X, Y, Z, RX, RY, RZ). Vælg rammen i Kopier ramme rullemenuen.
Dropdown-menuen Kopier ramme findes i parametrene for en sikkerhedsplan-definition på skærmbilledet Planer. Denne liste indeholder rammer, der er defineret på skærmen Rammer. Når du vælger en ramme, bruges den som definition af sikkerhedsplanet. Hvis du angiver parametre for forskydning, hældning og rotation, anvendes de på den valgte ramme (se "Konfiguration af et sikkerhedsplan"). Det resulterende sikkerhedsplan kombinerer alle parametre.
|
|
|
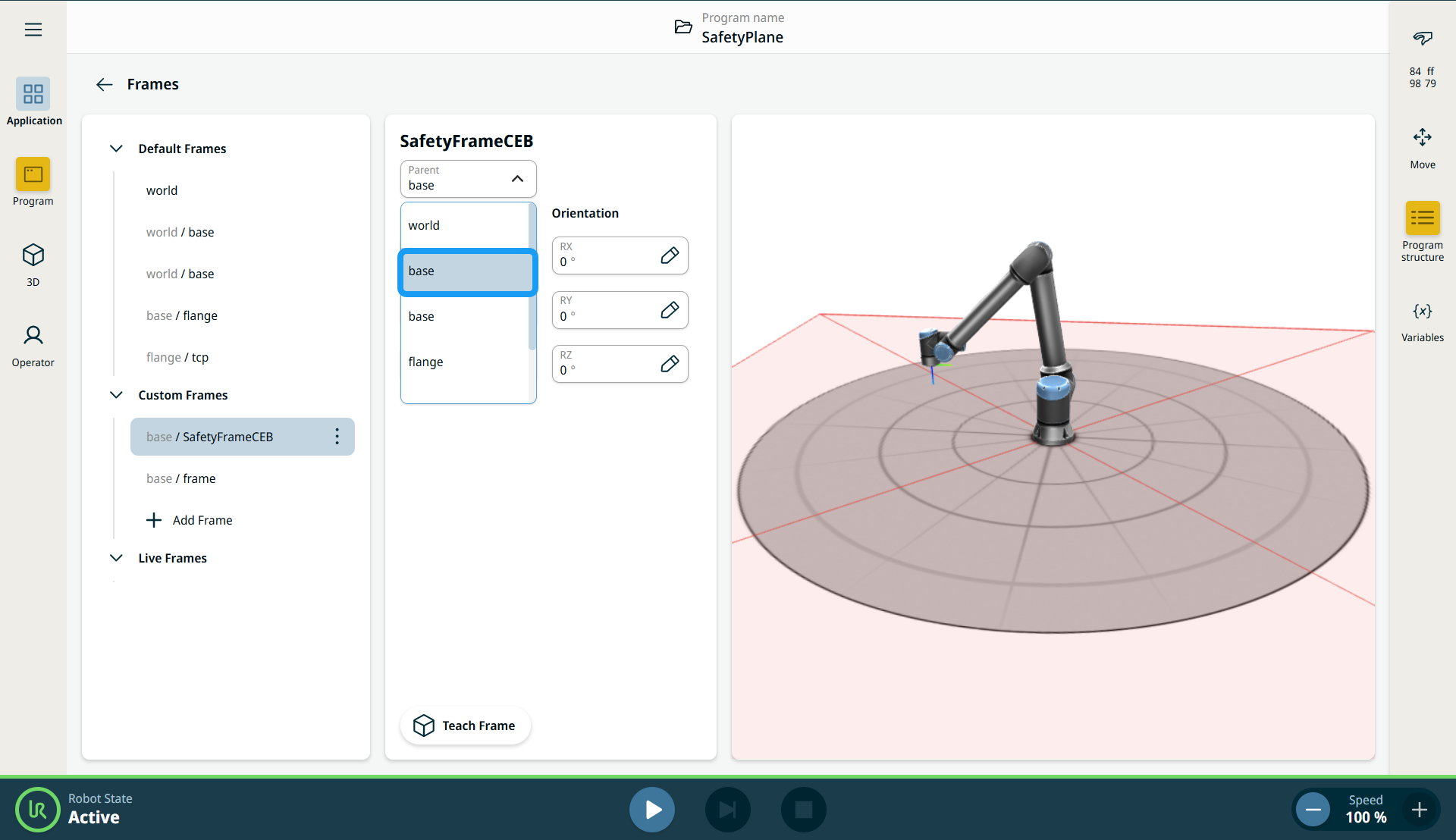
Se afsnittet "Rammer" i Softwarehåndbogen. |
|
Opret en ramme |
|
|
|
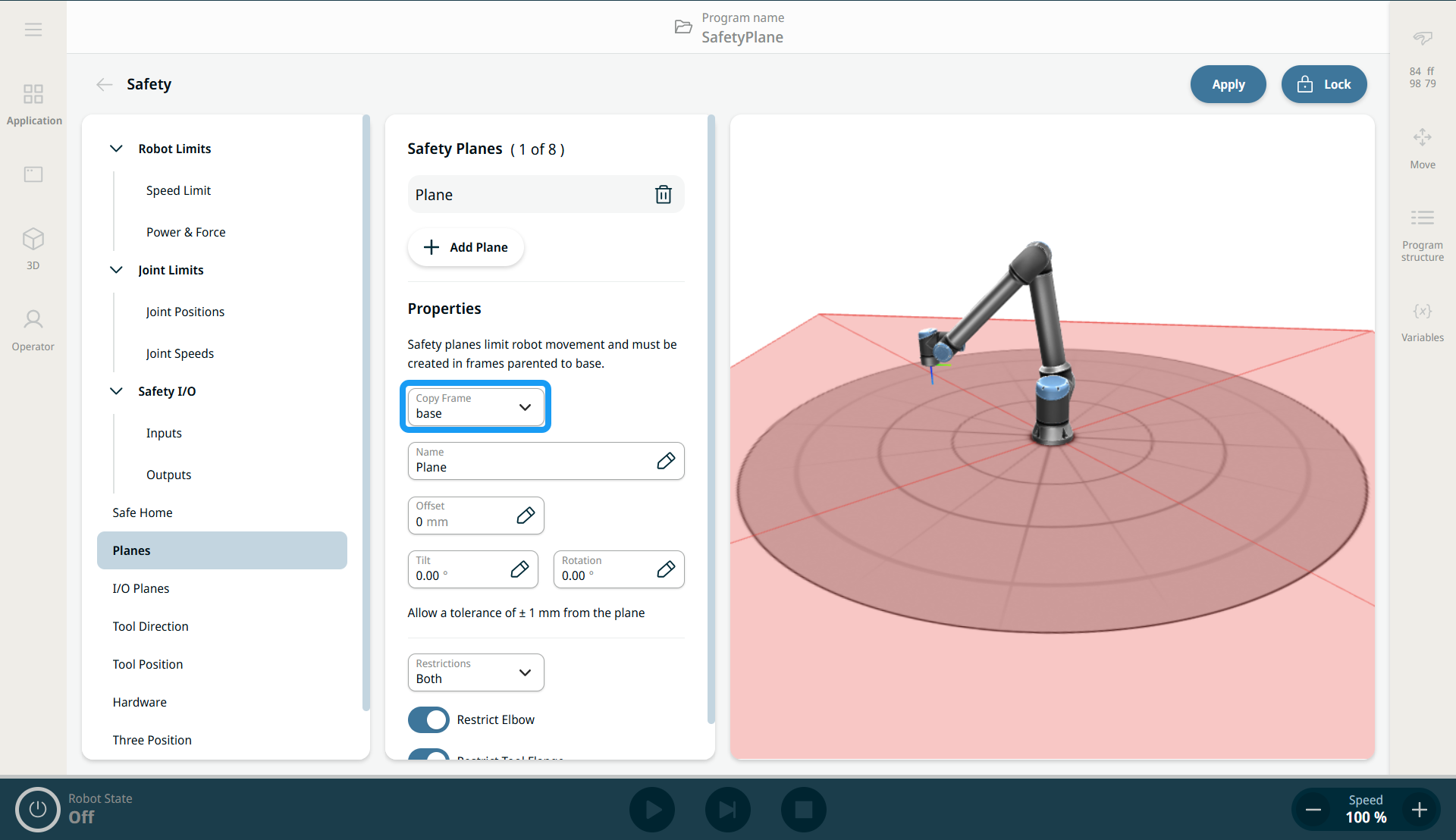
Vælg referenceramme i sikkerhedsplanet |
|
|
|
|
|
|
En ramme, der bruges til et sikkerhedsplan, kan være vendt på hovedet i forhold til, hvad du forventer. Hvis robotten er placeret på den side af planet, der overskrider grænsen, skal der tilføjes en hældning på 180 grader. For begrænsninger vedrørende plankonfigurationer, begrænsninger for albueled og værktøjsflange, se "Sikkerhedsplaner".
|