Sikkerheds I/O
| Beskrivelse |
I/O er opdelt mellem indgange og udgange og er sammensat i par, så hver funktion leverer en Kategori 3 PLd-kapacitet.
Når du starter programmer fra en I/O eller feltbusindgang, kan robotten begynde at bevæge sig fra den position, den har, det vil ikke være nødvendigt at udføre nogen manuel bevægelse til det første viapunkt via PolyScope.
|
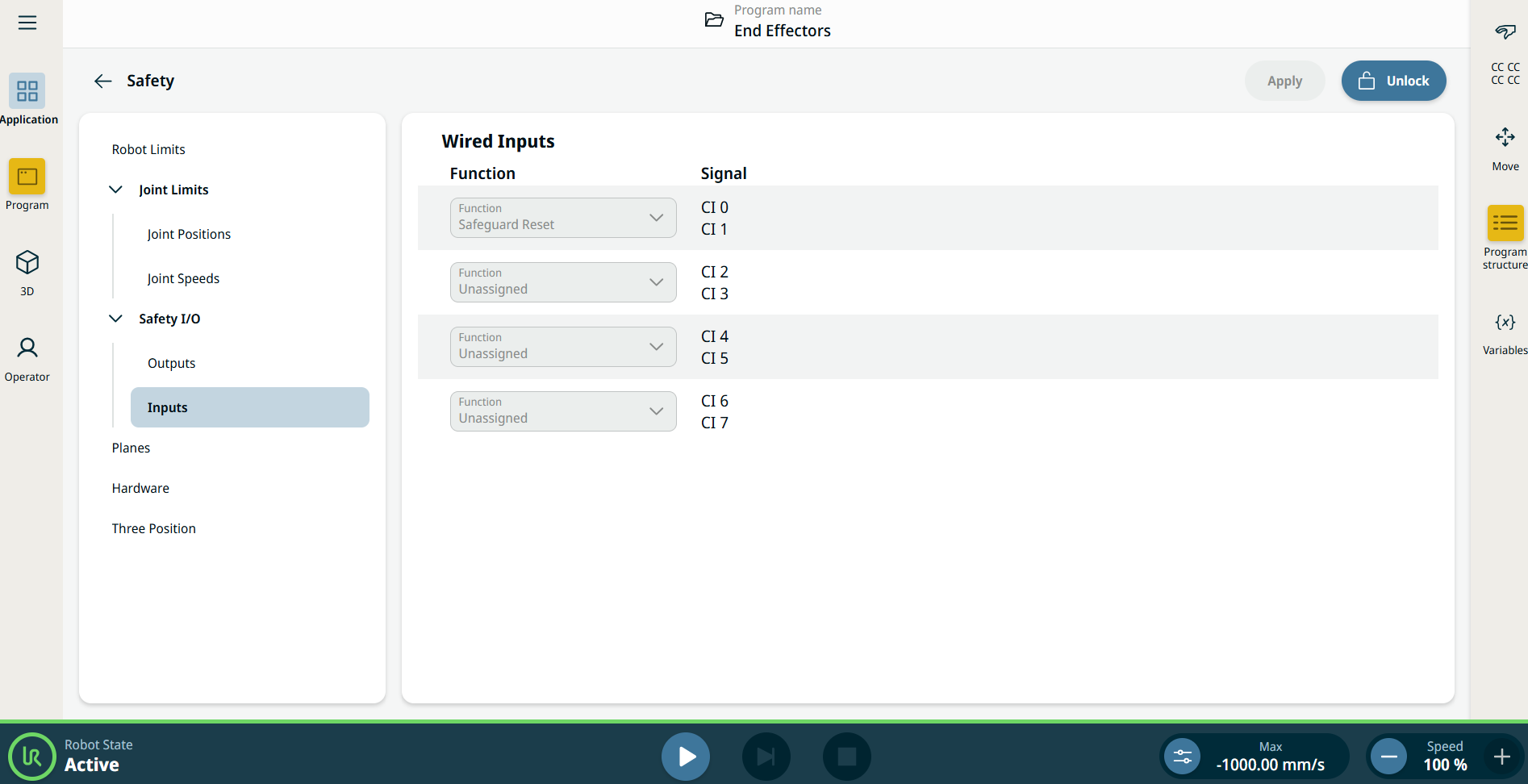
| Kontrolboks Indgange |
Inputtene er beskrevet i nedenstående tabel:
Når standard-nulstilling af beskyttelse er deaktiveret, sker der en automatisk nulstilling, når beskyttelsen ikke længere udløser et stop. Dette kan ske, hvis en person passerer gennem beskyttelsesområdet. Hvis en person ikke registreres af beskyttelsen, og personen udsættes for farer, er automatisk nulstilling forbudt ifølge standarderne.
Når automatisk tilstand-beskyttelsesstop er aktiveret, udløses et beskyttelsesstop ikke i manuel tilstand.
|
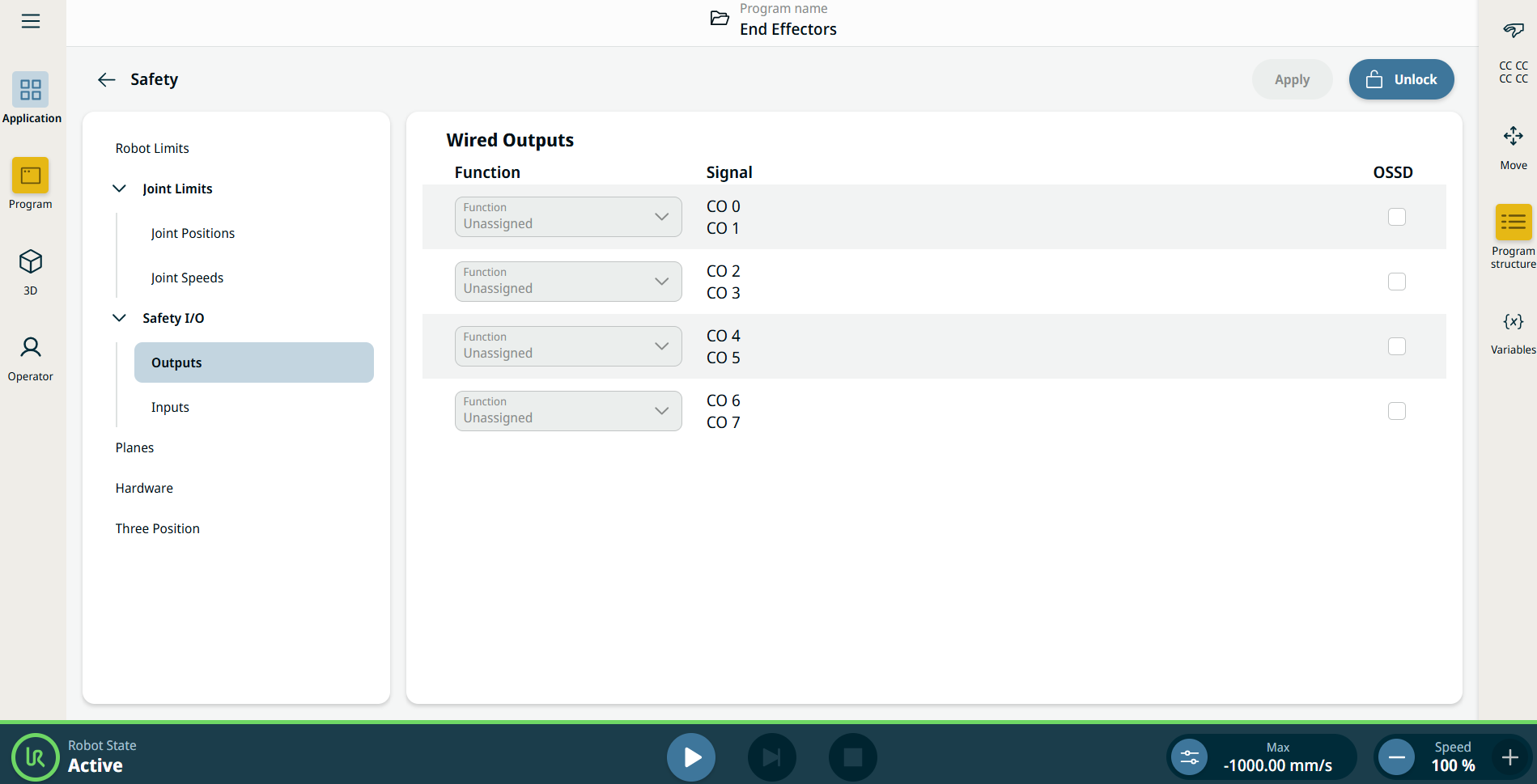
| Kontrolboks udgange |
Alle sikkerhedsudgange går lav i tilfælde af brud på eller fejl i sikkerhedssystemet. Dette betyder, at systemstop-udgangen indleder et stop, selv når et E-stop ikke udløses. Du kan anvende følgende sikkerhedsfunktioner for udgangssignaler. Alle signaler vender tilbage til lav, når den tilstand, der udløste det høje signal, afsluttes:
Eventuelle eksterne maskiner, som modtager nødstop-tilstanden fra robotten gennem udgangen Systemstop, skal overholde ISO 13850. Dette er særligt nødvendigt i opsætninger, hvor indgangen for robotnødstop er forbundet til et eksternt nødstop. I sådanne tilfælde bliver systemstop-udgangen høj, når det eksterne nødstop udløses. For at overholde sikkerhedsstandarderne er det derfor et krav, at der skal en manuel indblanding til, for at den eksterne maskine kan genoptage arbejde. For at overholde sikkerhedsstandarderne er det derfor et krav, at der skal en manuel indblanding til, for at den eksterne maskine kan genoptage arbejde.
|