Limit točivého momentu při sevření zápěstí
| Popis |
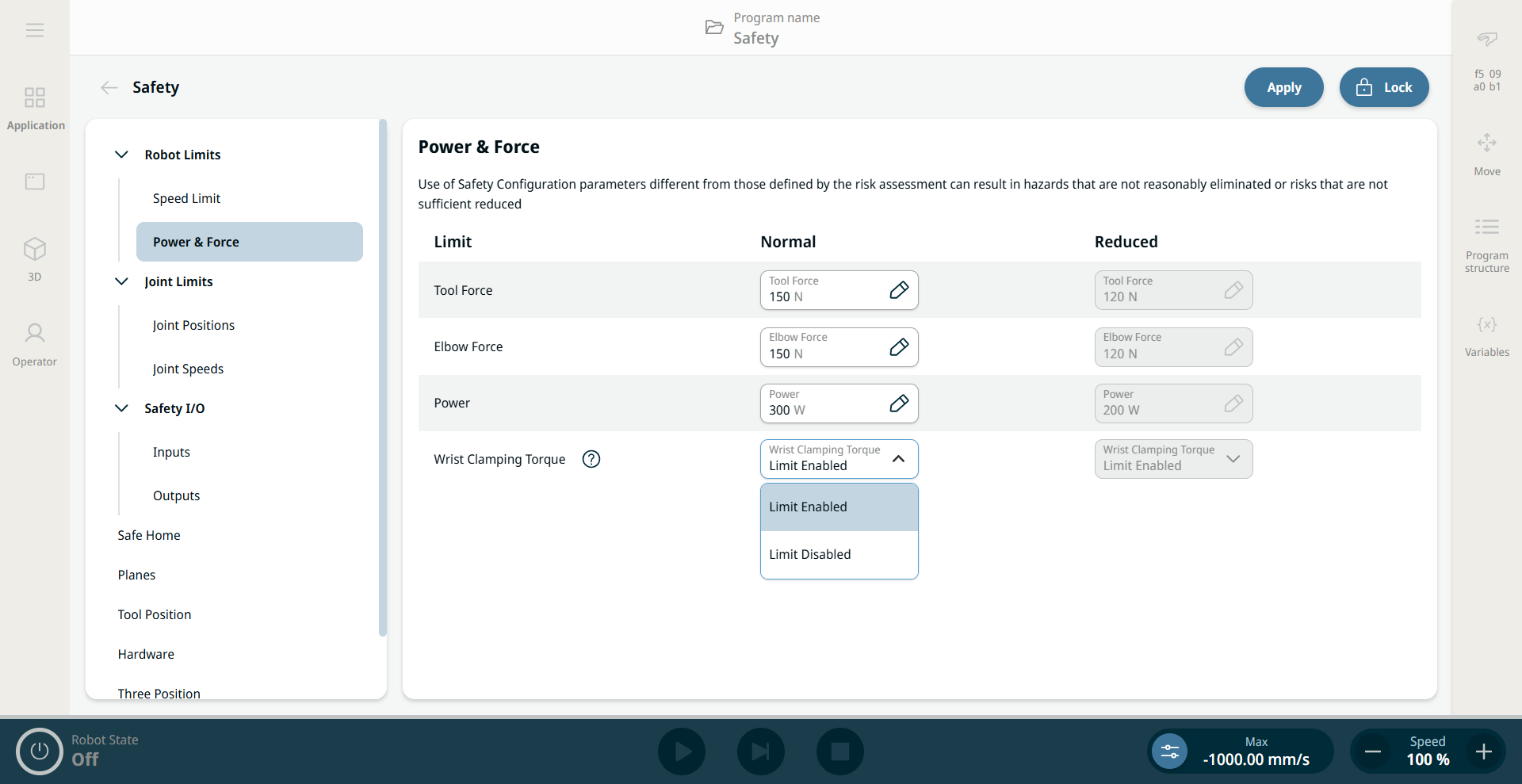
Limit točivého momentu při sevření zápěstí je nastavení, které povoluje nebo zakazuje omezení maximálního točivého momentu při sevření zápěstí robotu. Toto omezení je ve výchozím nastavení aktivováno. Tato bezpečnostní funkce omezuje točivý moment, který může zápěstí vyvinout při tlačení.
|
|
Podrobnosti limitu točivého momentu pro sevření zápěstí |
Když je tato funkce zapnutá, robot omezuje točivý moment v kloubech zápěstí, aby zabránil sevření mezi zápěstím, břemenem a dolním ramenem robota. Pokud je toto nastavení zapnuté, definuje také horní limit bez posouzení bezpečnosti pro okna aplikovaného točivého momentu kloubů základny, ramene a lokte. V aplikacích řízení síly mohou být dosažitelné kontaktní síly výrazně nižší než síly stanovené v bezpečnostních funkcích Limitech síly nástroje a Limitech síly lokte.
Pokud je tato funkce vypnutá, robot může v zápěstních kloubech použít vyšší tlačné síly, například pro aplikace s řízenou silou. Pokud je tato funkce deaktivována, je nutné riziko sevření mezi zápěstím, břemenem a spodní částí ramene robota snížit jinými způsoby. Tato bezpečnostní funkce je ve výchozím nastavení povolena u všech robotů. V PolyScope X verze 10.12 a vyšší je možné tuto bezpečnostní funkci zakázat.
|
|
Zapínání a vypínání omezení točivého momentu při sevření zápěstí |
|