Program Structure Nodes
| Description |
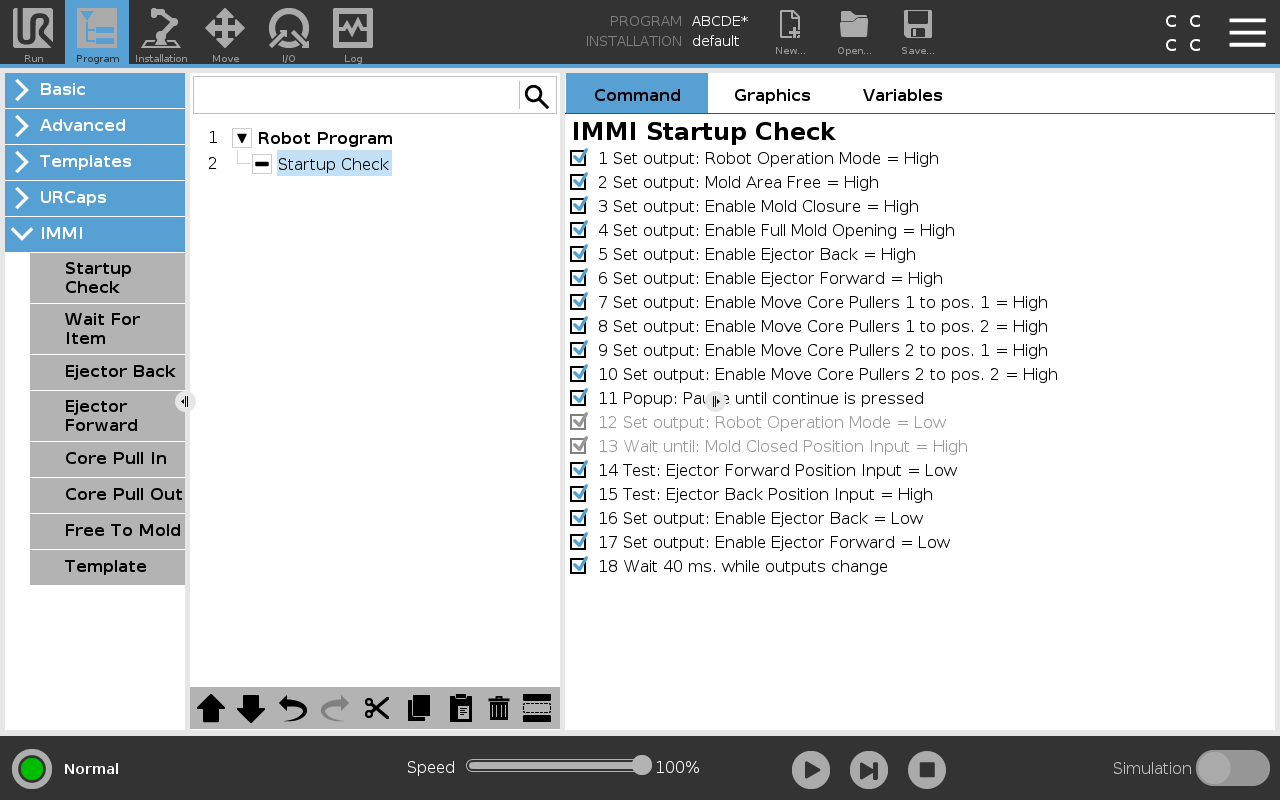
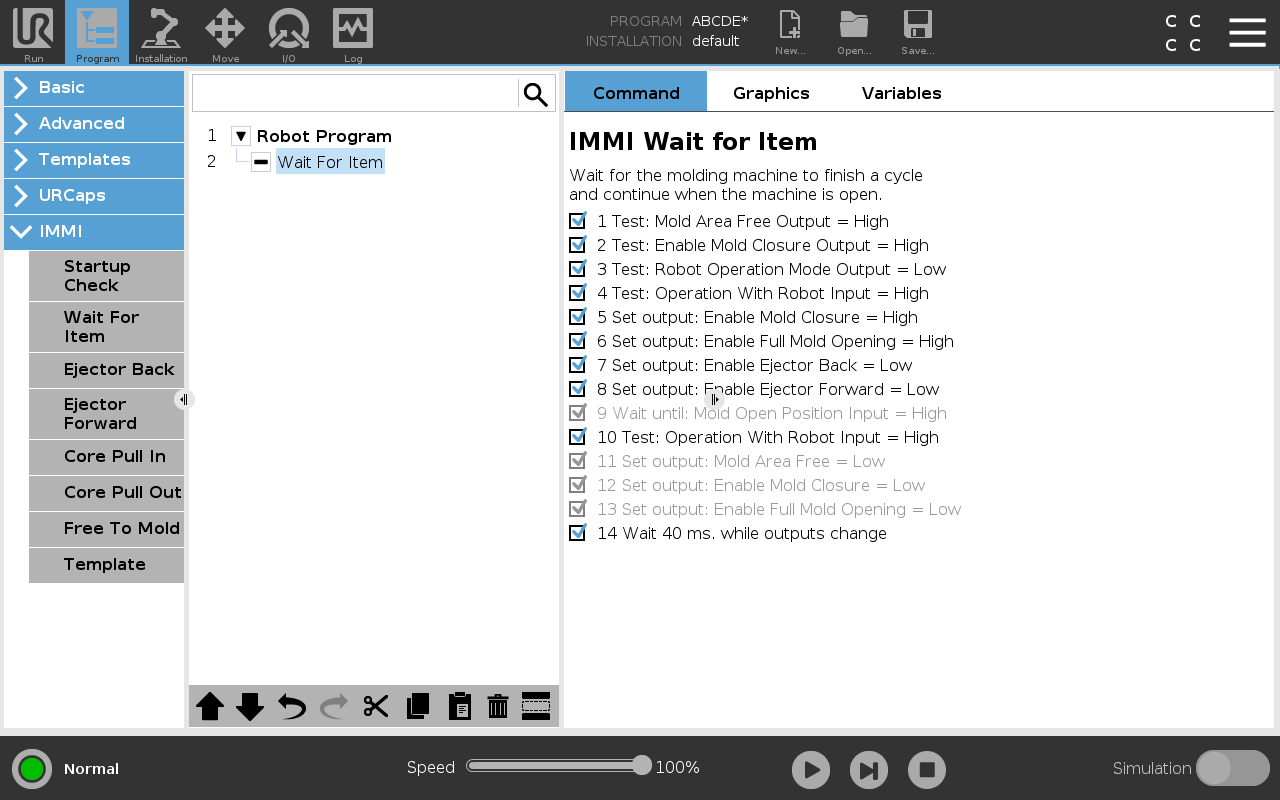
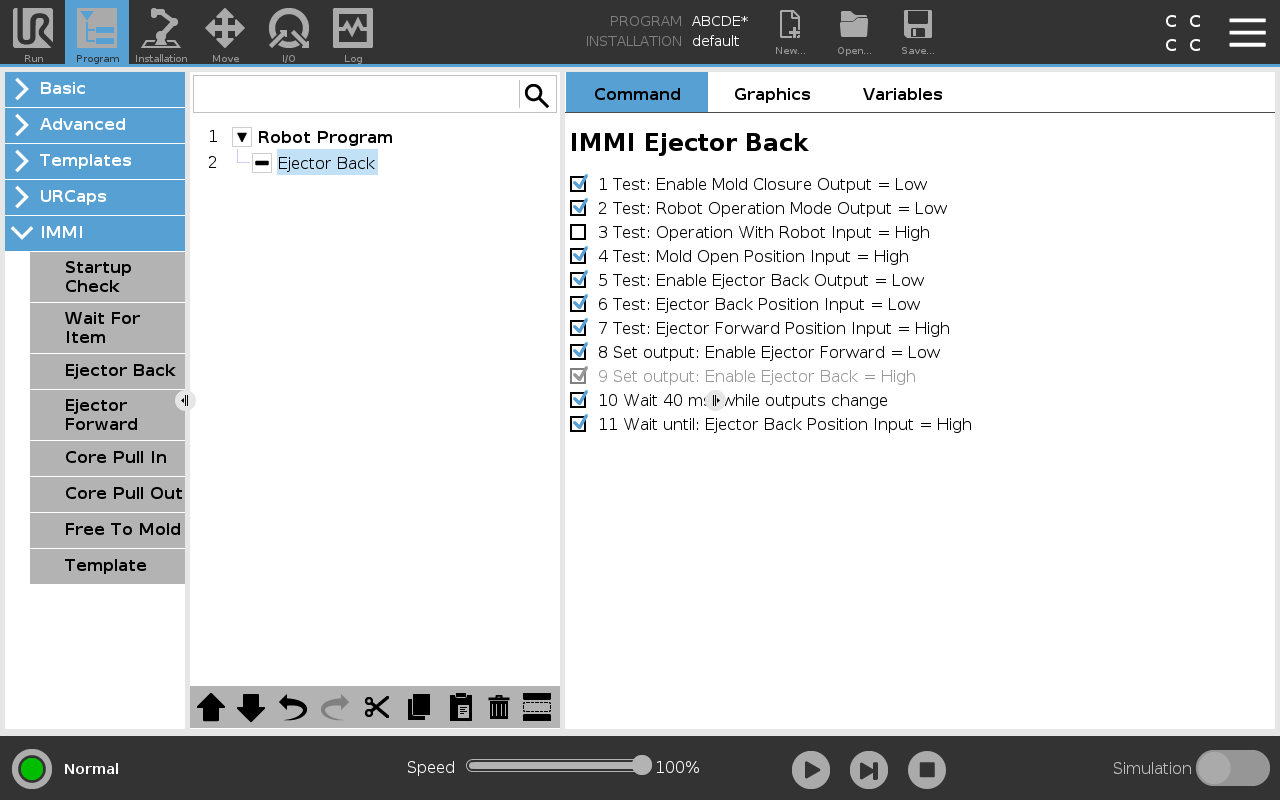
You can configure the step sets in each node by using the checkboxes to enable/disable individual steps.
|
| Startup Check |
Intended for use once at the beginning of a robot program, this node ensures the robot and machine are set up correctly before molding starts.
|
| Wait for Item |
Intended for making the robot wait until an item is ready from the IMM.
|
| Ejector Back |
Enables the movement of the ejector to its back position.
|
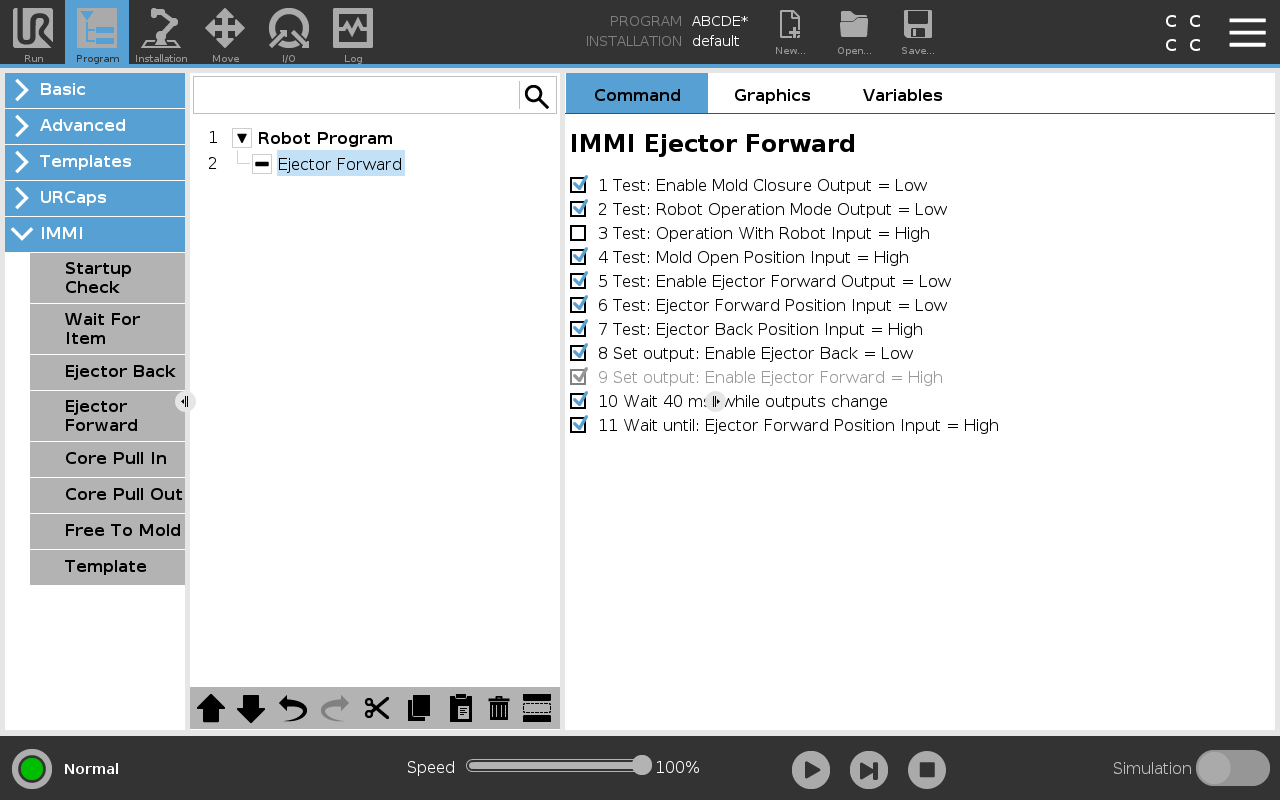
| Ejector Forward |
Enables the movement of the ejector to remove an item from the mold. Should be used when the robot is in position ready for grasping the item.
|
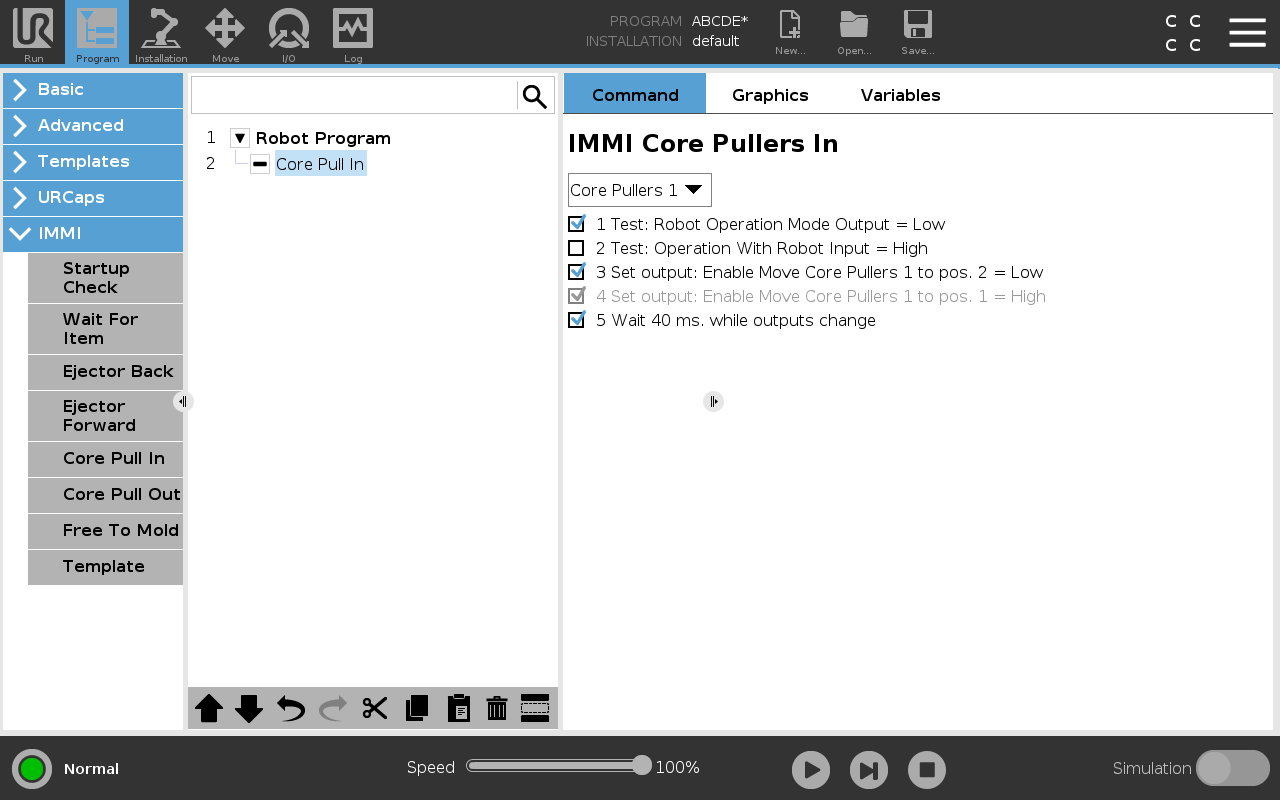
| Core Pullers In |
Enables the movement of the core pullers to position 1. The core pullers used are selected from the drop down menu.
|
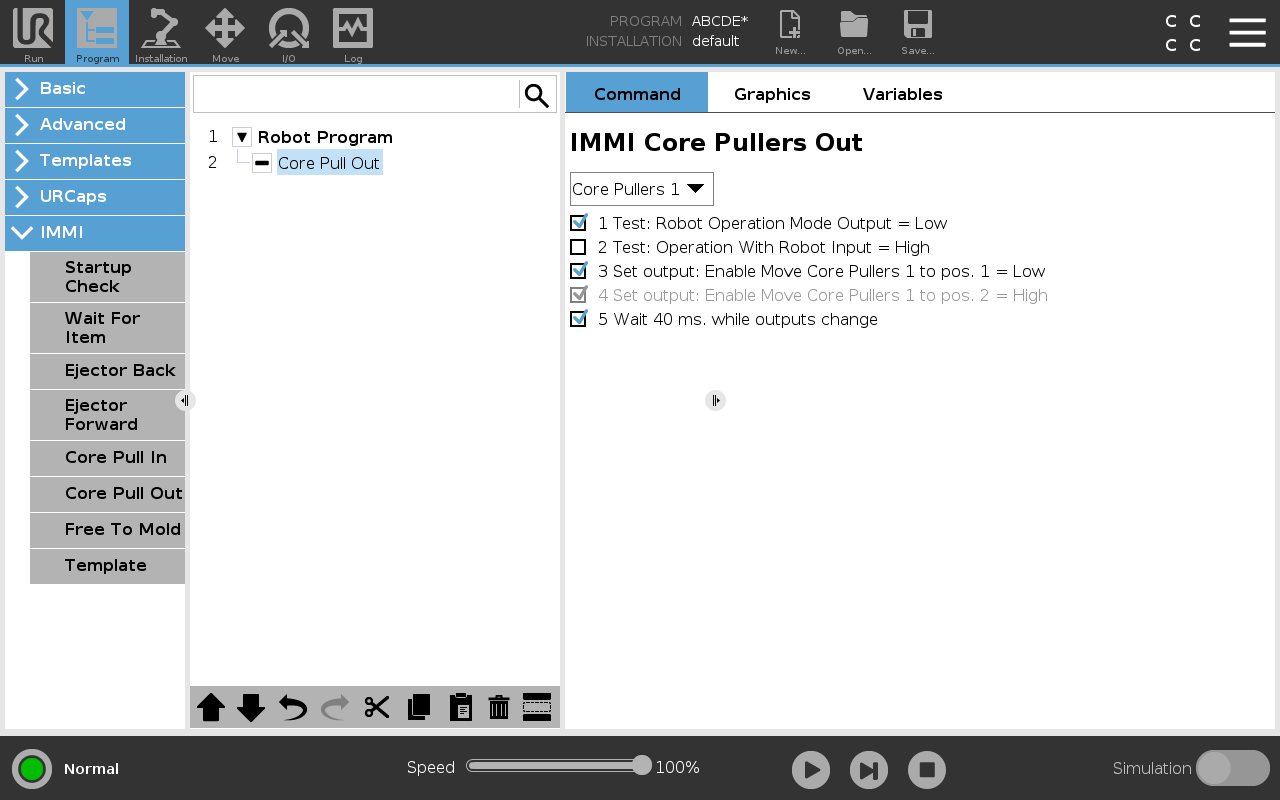
| Core Pullers Out |
Enables the movement of the core pullers to position 2. The core pullers used are elected from the drop down menu.
|
| Free to Mold |
Signals to the IMM that it is allowed to start a molding operation. When this signal is activated, the robot must be placed outside the IMM.
|
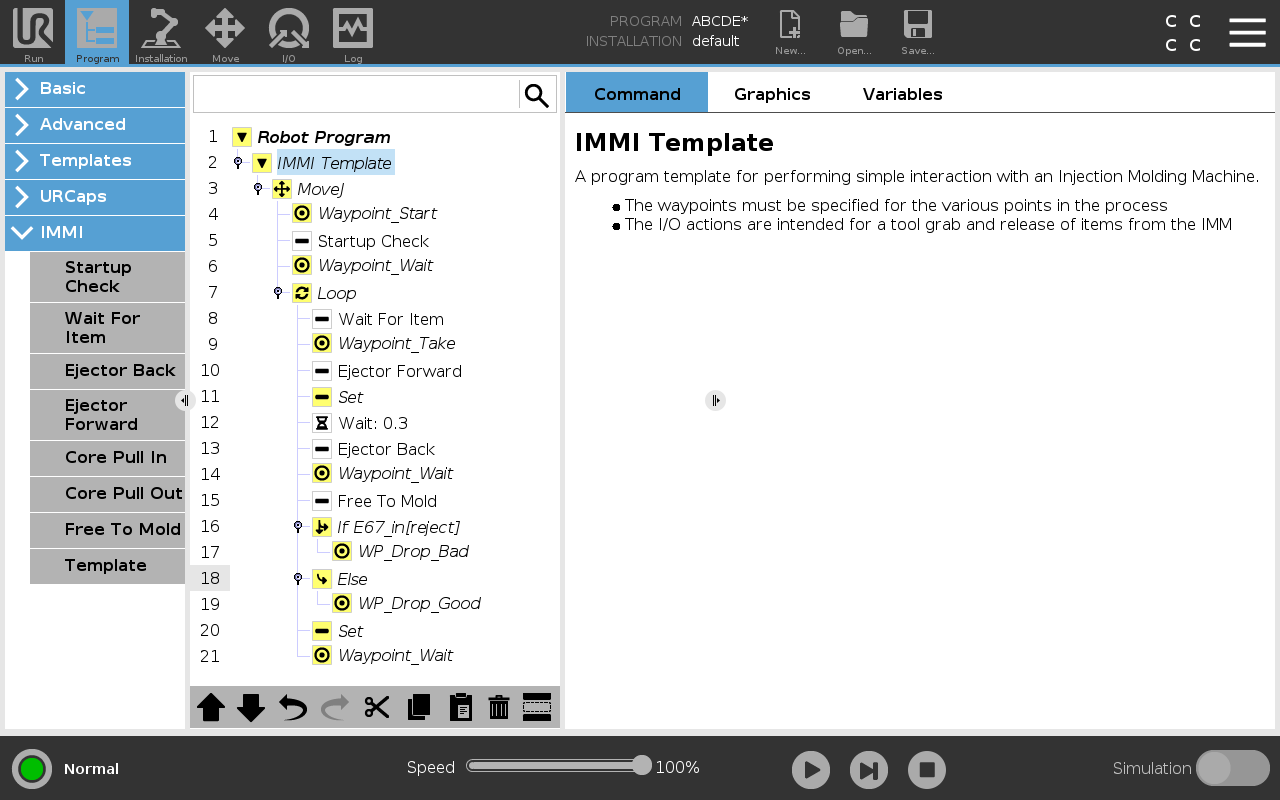
| Template |
Uses a predefined program structure to perform simple interaction with the IMM.
|