Screwdriving Points
| Description |
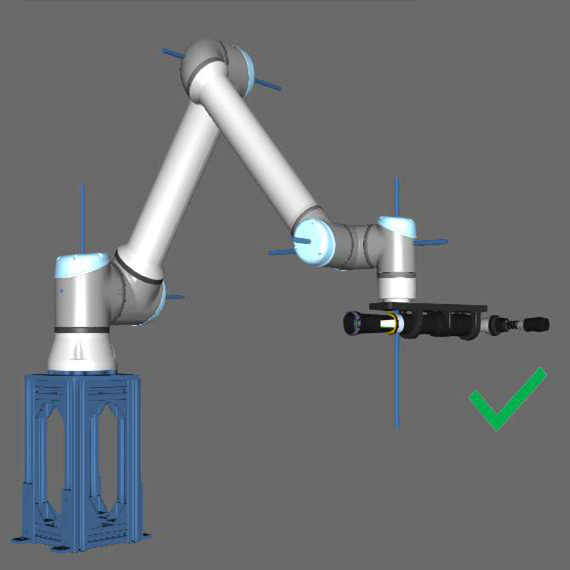
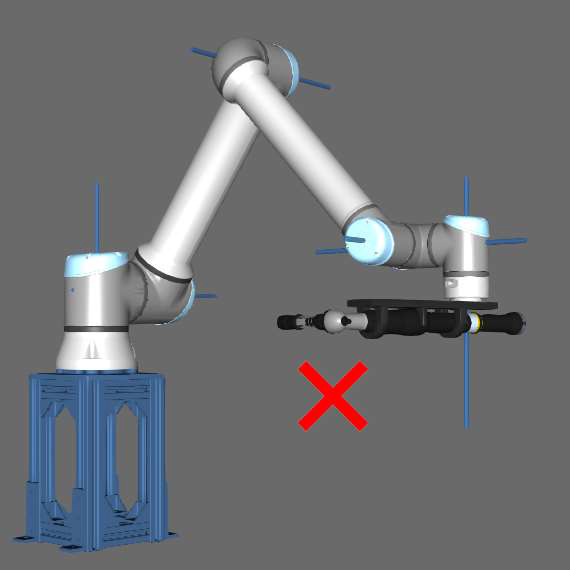
With the TCP/tool position properly defined, at each of the screwdriving points the tool force limit restricts the amount of torque allowed to be generated by each of the joints. Further to this, the lever arm concept tells us that a shorter lever arm results in generation of a larger force from the same torque. So if the robot is in a pose where the TCP is very close to any of the joints, the torque generated by that joint will be more restricted by the safety system to prevent high forces.
Therefore, where possible it’s best to avoid poses where the TCP is closer to any of the joints.
|