Maximum Joint Torque Values
| Description |
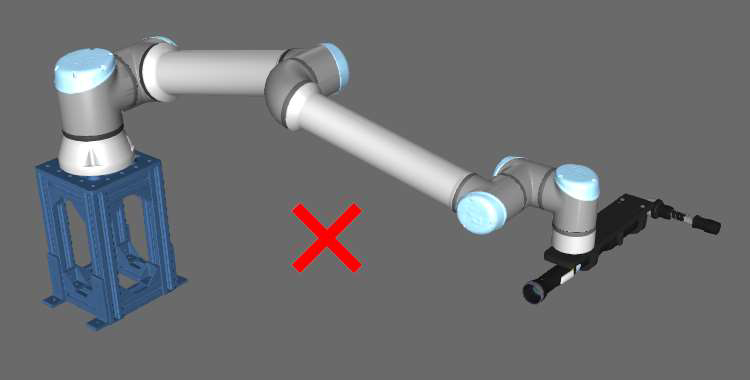
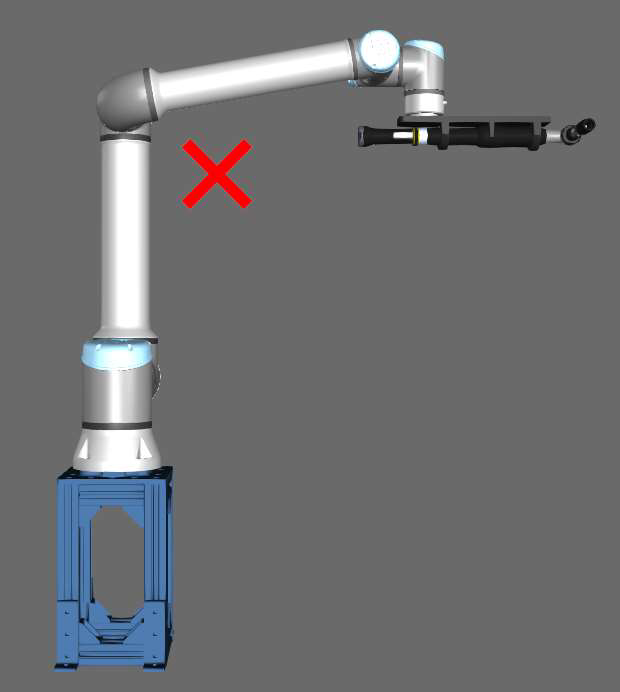
Robot poses with the arm fully extended (tool flange close to the outer workspace limit), or with one or more joints close to their maximum torque values should be avoided. Ideally the robot can use as much of the available torque in every joint as possible in counteracting the screwdriving torque, rather than maintaining the robot position.
|