I/O Setup
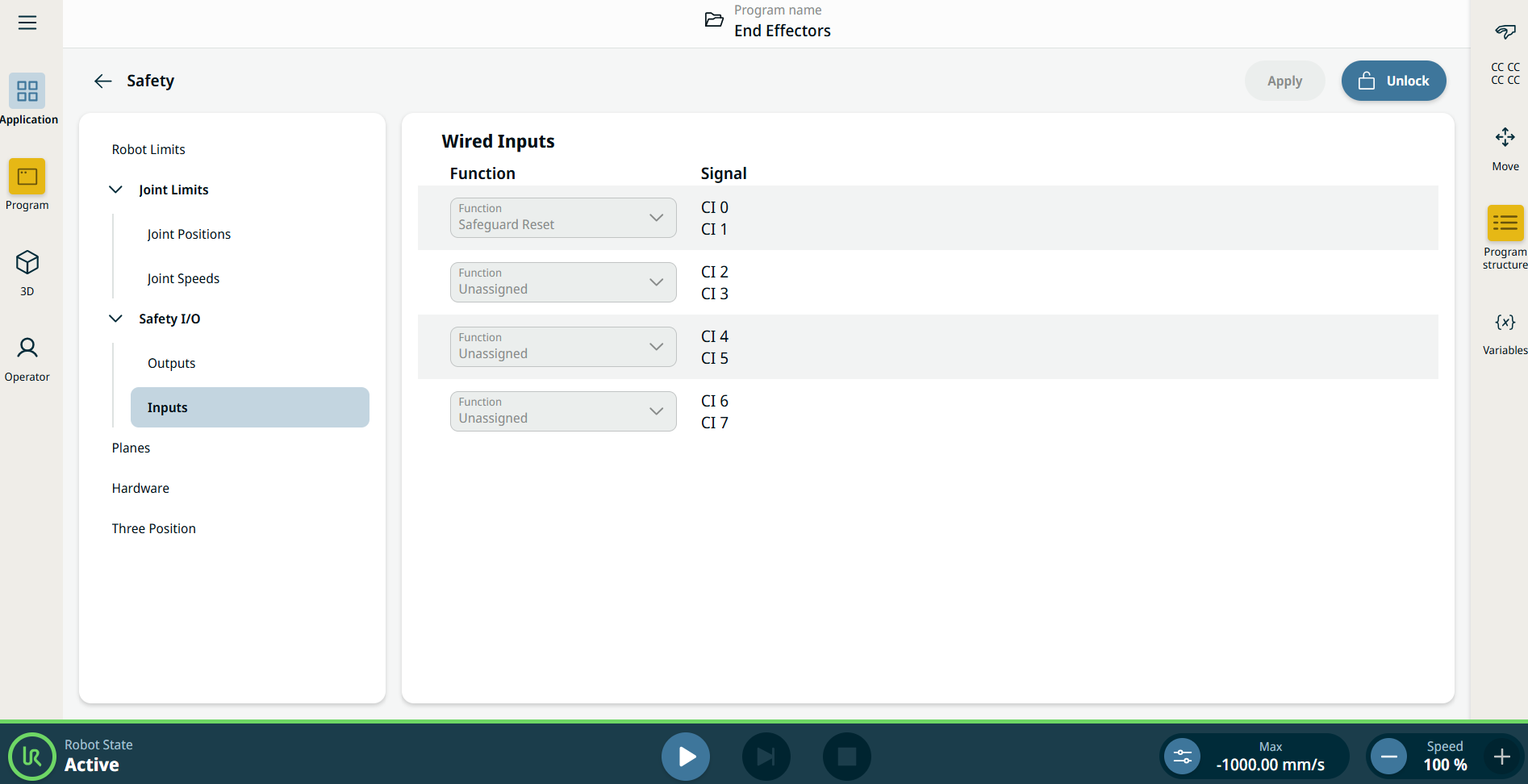
| Inputs |
See the Safety I/O Signals for a description of the safety function.
|
| Available Input Actions |
If the robot is stopped while using the Start input action, the robot slowly moves to the first waypoint of the program before executing that program. If the robot is paused while using the Start input action, the robot slowly moves to the position from where it was paused before resuming that program.
|
| Outputs |
You can enable OSSD on each output signal. See the Safety I/O Signals for a description of the safety function.
|
| Available Output Actions |
|
| Program Termination Cause |
An unscheduled program termination can occur for any of the reasons listed below:
|