協働ロボットの費用検討ガイド ― 導入コストの全体像と予算計画の考え方
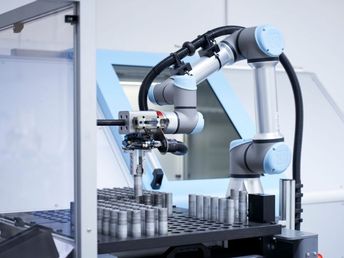
ユニバーサルロボット(UR)は、柔軟な自動化を実現する協働ロボットの業界標準として、幅広い分野で採用されています。 本ガイドでは、自動化プロジェクト全体のコストに影響する主な要素を整理し、予算計画の立て方、ソリューション比較のポイント、投資額を左右する要因を分かりやすく解説します。 これからURの導入を検討するチームが、現実的かつ納得感のあるコスト把握を行うための指針となる内容です。

協働ロボットシステムの費用に影響する要因とは?
自動化プロジェクトを計画するうえで、どのロボット機種を選ぶかは、総投資額を左右する最も大きな要素の一つです。
ユニバーサルロボット(UR)は、可搬重量、リーチ、性能の異なる複数の協働ロボットをラインアップしています。
これらの性能差は、ロボット本体の価格だけでなく、インテグレーションの難易度や必要となる周辺機器・設備にも直接影響します。
主な性能要素と価格への影響
- 可搬重量
UR20 や UR30 のような高可搬モデルは、重量のある部品や箱のハンドリングに対応できます。 - リーチ(動作範囲)
UR8 Long のようなロングリーチモデルは、溶接、マシンテンディング、バラ積みピッキングなど、より広い作業エリアをカバーできます。 - 精度と柔軟性
UR3e などの小型モデルは、繊細な組立作業に優れています。
プロセスに最適な機種を選定することで、必要以上に大きなロボットを導入したり、過剰な工夫や追加設備を要する構成を避けることができます。
要するに、ロボットの性能はプロジェクト全体の前提条件(ベースライン)を決める要素であり、
ツール設計からソフトウェア要件に至るまで、あらゆるコストに影響します。
次のステップは、プロジェクト要件の明確化です。
以下では、導入コスト全体に影響を与えるその他の検討ポイントを見ていきます。

エンドエフェクタ(EOAT)
エンドエフェクタ(EOAT:ロボット先端ツール)の選定は、自動化プロジェクト全体の投資額に大きく影響します。 必要となるツールの種類や構成によって、初期コストだけでなく、調整工数や将来の拡張性も変わってきます。
- 平行グリッパ/アダプティブグリッパ
- 真空吸着ツール/マグネット式ツール -デュアルグリッパ(2ハンド)構成
- 用途に合わせた専用設計ツール
- ツールチェンジャーやマルチツール構成

ビジョン・センシング・認識技術
URロボットの導入では、用途によって追加の知能化システムが必要になるケースがあります。これらはロボットの適用範囲を広げる一方で、システム構成やコストに影響します。
- 2D/3Dビジョンシステム
- バーコード/RFID リーダー
- 力・トルクセンサ
- 機械学習を活用した外観検査・認識ツール

インテグレーションおよびエンジニアリング工数
産業用自動化のコストは、ロボットセルの構成や複雑さに大きく左右されます。 セルが高度になるほど、設計・制御・立ち上げに必要な工数も増加します。
- ワークセルのレイアウト設計・機構設計 PLC やネットワークとの統合
- ワークハンドリング、動作シーケンス、安全に関するプログラミング
- 現地での据付、立ち上げ、最適化作業
- 目標タクトタイム達成に向けた動作調整・チューニング

安全対策
安全規格への適合は、プロジェクト全体の構成や規模を左右する重要な要素です。
- 安全スキャナやエリアセンサ
- インターロック、ガード、囲い
- リスクアセスメントの実施
- 地域ごとの安全規格に対応した適合文書の整備

ロボットセル構成部品・インフラ設備
ロボット本体以外にも、自動化プロジェクトではさまざまな周辺設備やインフラが必要になります。これらは見落とされがちですが、全体コストに確実に影響する要素です。
- ロボット架台、ベース、可動カート
- コンベヤやワーク供給・位置決め装置
- 治具・ネスティングシステム
- ケーブル配線・電源分配
- 保管ラックや周辺機器

トレーニング・保守サポート
ロボット導入後の長期的な運用コストも、初期投資と同様に重要な検討ポイントです。これらをあらかじめ見込んでおくことで、突発的な停止リスクを抑え、安定した稼働と総所有コスト(TCO)の最適化につながります。
- オペレーターおよび保全担当者向けトレーニング
- リモートサポートおよびオンサイト対応
- 予防保全プラン
- 延長保証(オプション)
- ソフトウェアアップデートおよび性能チューニング

導入形式
URシステムは、キャッシュフローや投資計画に合わせて選べる複数の導入形態があります。どの方式を選ぶかによって、初期費用の負担や運用コストの考え方が変わります。
- 一括購入(設備投資)
- リース/ファイナンス
- RaaS(Robotics as a Service:月額課金モデル)
- 短期レンタルによるパイロット導入
URプロジェクトの予算を見積もる方法
正確な金額が分からない段階でも、以下の手順を踏めば、概算費用を組み立てることができます。
1. アプリケーションを明確にする
まずは、対象となる作業内容を具体化します。
- 可搬重量
- リーチ(動作範囲)
- タクトタイム
- ワーク種類・品種数
- 設置環境(周囲設備、温度、粉塵など)
2. 必要なツール・センサを洗い出す
使用する周辺機器を具体的に整理します。
- グリッパの種類
- ビジョンの要否・方式
- 各種センサや検査ツール
- 専用治具・ワーク固定具の有無
3. インテグレーションの難易度を評価する
以下の条件がある場合、プロジェクト規模や工数が増加する傾向があります。
- 複数の品種・形状(SKU)への対応
- 厳しいタクトタイム要求
- 設置スペースの制約
- 複数工程を含むシーケンス動作
- 作業ばらつきが大きい用途
(例:製品サイズが異なるパレタイズ/デパレタイズ) - 安全要件
(センサ、ガード、協働ゾーンの設定など)
4. 設置・立ち上げ・教育を含める
以下の作業も予算に含めて考えます。
- 現地でのプログラミング
- 最終調整・チューニング
- オペレーター/保全向けトレーニング
5. 長期サポートを考慮する
ロボットのライフタイム全体を見据え、保守・サービス費用も計画に入れます。
- 定期メンテナンス
- サポート契約
- 将来的なアップデート対応
アプリケーション別の導入イメージ例
以下の例は、アプリケーションの複雑さが投資規模にどのように影響するかを理解するための参考シナリオです。
シンプルなピック&プレース
- 軽量ワーク
- シンプルなグリッパ
- 最小限の安全対策
- 短期間での導入・立ち上げ

検査・機械へのワーク脱着
- ビジョンシステムの使用
- 繰り返し位置決め精度
- 複数のワーク固定治具

パレタイジング/デパレタイジング
- より長いリーチを持つアーム
- 吸着式ハンド
- 安全センサや囲い
- コンベヤ、パレット搬送設備

多品種生産
- 高度なプログラミング
- マルチツール/マルチグリッパ構成
- ワークばらつきに対応する3Dビジョン
- 可変治具やセンサを用いた柔軟なワーク対応
ロボットシステムの費用を公平に比較するには
協働ロボットを用いた自動化ソリューションを評価する際は、単純な本体価格だけで比較しないことが重要です。
以下のような項目を同じ条件で洗い出して比較することで、実態に即した判断ができます。
比較すべき主な項目
- ロボット本体
- エンドエフェクタ・センサ類
- ソフトウェアモジュール
- インテグレーションサービス
- 安全機器・安全対策
- トレーニングおよび立ち上げ支援
- 導入後のサポート
- 保証内容・カバレッジ
- 消費電力
こうした観点で整理することで、インテグレーターや提案内容の違いを正しく比較でき、公平な評価が可能になります。
ご相談はこちら
FAQ:ユニバーサルロボットの価格・予算計画
Q. 見積もりはどのくらいの期間で出ますか? A. アプリケーション内容が明確であれば、多くのインテグレーターが短期間で詳細見積もりを提示できます。 Q. ユニバーサルロボットはレンタルすることはできますか? A. はい、レンタルサービスを提供している会社をご紹介します。 Q. 大型のURロボットは価格が高くなりますか? A. 一般的に、可搬重量やリーチが大きくなるほど、投資額も増加します。 Q. URロボットには必ず専用ツールが必要ですか? A. いいえ。アプリケーションによっては設計済みの汎用ツールで対応可能で、専用設計が必要になるのは限定的なケースです。 Q. インテグレーションコストが高くなる要因は何ですか? A. 高い処理能力(タクト)要求、複雑な動作シーケンス、専用ツール、広範な安全対策などが主な要因です。
