手の届くところにあるロボット-それがこのブログの目的です。
99 投稿
表示中
ユニバーサルロボットのダイレクトトルク制御により、低レベルの力制御を実現。関節トルクやロボットの動特性に直接アクセスできるため、接触を伴う高度な作業や、シミュレーションから実機へのスムーズな展開に向けた柔軟なモーション制御の開発が可能になります。
製造業は、急速に変化する市場環境への対応と並行して、労働力不足、スキルギャップ、労働力の高齢化といった重圧に直面しています。多くの環境において、従来の自動化は限界に近づいています。
ユニバーサルロボット(UR)は、柔軟な自動化を実現する協働ロボットの業界標準として、幅広い分野で採用されています。本ガイドでは、自動化プロジェクト全体のコストに影響する主な要素を整理し、予算計画の立て方、ソリューション比較のポイント、投資額を左右する要因を分かりやすく解説します。これからURの導入を検討するチームが、現実的かつ納得感のあるコスト把握を行うための指針となる内容です。
製造業の現場では、多種多様な産業機械が活用されており、生産効率の向上や品質の安定化に大きく貢献しています。さらに近年、デジタル技術やIoTの発展によって、新たな技術が次々と登場しており、これらを把握することが重要です。本記事では、産業機械の概要を解説し、その種類や失敗しないメーカー選びのポイントを詳しく紹介します。
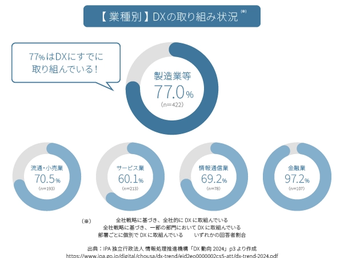
さまざまな業種でDXの活用が進むなか、製造業でもDXの推進が強く求められています。国際競争の激化や人材不足といった製造業特有の課題を解決するためには、DXによって業務の効率化や生産性の向上を図ることが欠かせません。本記事では、製造業の経営者の方々に向けて、製造業DXのメリットや必要性、進め方のポイントを紹介します。
製造業運営には、人手不足、市場変化への対応など、さまざまな課題があります。それらの解決法のひとつとして近年注目を集めているのが、最先端技術を活用した「スマートファクトリー」です。本記事では、そもそもスマートファクトリーとは何か、導入時のメリット・デメリットについて解説します。実際の導入事例も紹介しますので、導入を検討中の企業担当者は参考にしてください。
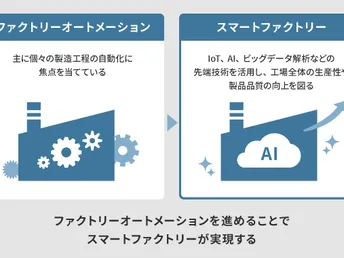
人材不足や製造工程の多様化など、製造業が抱える課題は多種多様です。これらの課題を解決するための有効な手段として、工場の自動化を実現するファクトリーオートメーションが大きな注目を集めています。本記事では、ファクトリーオートメーションの概要やメリット・デメリットなどについて詳しく解説します。
ユニバーサルロボットの「ダッシュボードサーバー」は、遠隔操作を可能にする機能を紹介します。
Teradyne Robotics グローバル・テクニカル・コンプライアンス・オフィサーの ロベルタ・ネルソン・シア を中心に、世界各国の専門家チームが結集し、ロボット機器、ロボットアプリケーション、ロボットセルに関する安全要求事項を策定しました。 本記事では、改訂された ISO 10218 安全規格について、ネルソン・シア氏に話を聞き、ロボットメーカー、システムインテグレーター、そしてエンドユーザーにとって、この改訂が何を意味するのかを分かりやすく解説します。
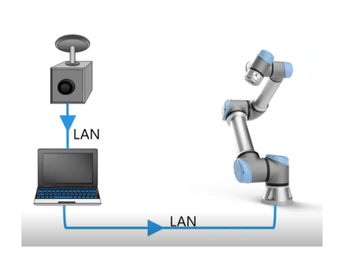
SOCKET通信やPCカメラからの座標取得方法について説明します。 カメラから取得した座標データをロボットに送信し、その座標へロボットを移動させるプログラミング方法をご紹介します。
現代の製造業において産業用ロボットは、生産性の向上や人手不足の解消などにおける重要な鍵を握ります。本記事では、産業用ロボットとは何か、基本的な定義や用途、種類、導入のメリットなどについて分かりやすく解説します。本記事を読むことで、産業用ロボットに関する基本知識を身につけることが可能です。
近年、製造工場などでは労働者不足の解消や生産性の向上のために産業用ロボットや協働ロボットが大活躍しています。本記事では、この産業用ロボットと協働ロボットの違いについて解説します。設置場所や設置方法など、ポイントごとに比較しているので、どちらのロボットを導入するかで迷っている方はぜひ参考にしてください。
インサイト、会社の最新情報、カスタマーサクセスストーリーが受信トレイに直接届き、常に最新情報を把握できます。