Robot SCARA vs robot collaborativo: il pick and place
Nella scelta della forma di automazione più corretta ed efficace, un esperto di processi robotici si fa guidare da domande inerenti la natura stessa dell’applicazione da automatizzare, il tipo di attività che il robot deve eseguire, il tipo di componente/prodotto coinvolto nell’applicazione. Questi criteri guidano la scelta della tipologia di robot più confacente. Ogni forma di robotica offre infatti una specializzazione che la rende più efficace su alcuni task e meno su altri.

SCARA O COBOT PER IL PICK AND PLACE? DIFFERENZE, VANTAGGI E SVANTAGGI
Nella scelta della forma di automazione più corretta ed efficace, un esperto di processi robotici si fa guidare da domande inerenti la natura stessa dell’applicazione da automatizzare, il tipo di attività che il robot deve eseguire, il tipo di componente/prodotto coinvolto nell’applicazione. Questi criteri guidano la scelta della tipologia di robot più confacente. Ogni forma di robotica offre infatti una specializzazione che la rende più efficace su alcuni task e meno su altri.
In questa serie di due post andremo a confrontare prestazioni e utilità di due forme di robot (SCARA e cartesiano) rispetto alla robotica collaborativa su un task specifico: il pick&place, quindi la movimentazione, presa e posizionamento di un componente.
SCARA
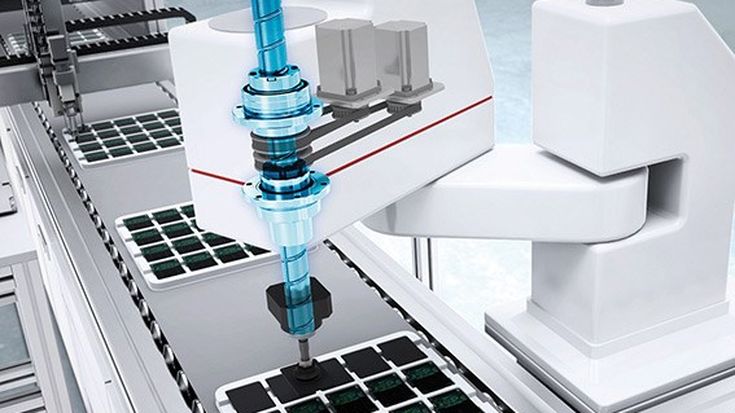
Lo SCARA, acronimo di Selective Compliance Assembly Robot Arm, è un tipo di robot industriale, che muove un "braccio" sul piano orizzontale e una presa che può salire e scendere in quello verticale. Un robot SCARA lavora su quattro assi e quattro gradi di libertà. Tutti gli assi sono progettati con una catena cinematica, partendo da un'origine dell'asse slave, rispetto alla posizione del precedente asse. In un robot SCARA, il primo e secondo asse sono di rotazione, il terzo e il quarto asse sono generalmente lineari, realizzati con viti a ricircolo di sfere. La presa è montata sulla parte finale dell'asse Z.
Uno SCARA può permettere raggi di azione da 100 mm a 1.200 mm, con capacità di carico pagante da 1 kg a 200 kg. Questo tipo di robot venne sviluppato per alte velocità e ripetibilità in montaggi in serie, come il Pick-and-Place. Il punto di forza sta nell'alta forza di manipolazione verticale (a volte >300N). Punto negativo il fatto di poter lavorare solo su un piano orizzontale. Per alcune applicazioni esistono esemplari a 5/6 assi.
Lo SCARA permette quindi di garantire ritmi sostenuti e di automatizzare con elevata velocità applicazioni di manipolazione, ma presenta alcuni limiti rispetto ai cobot:
- 4 gradi libertà (anziché 6)
- Minore flessibilità (non è applicabile in altro che non siano assemblaggi o pick&place)
- Nessuna collaboratività: la sua applicabilità è condizionata alla presenza di barriere di recinzione e sistemi di sicurezza.
Viceversa, rispetto a un robot collaborativo, lo SCARA garantisce dinamiche più elevate e una più elevata precisione di posizionamento che lo rendono perfetto per processi a elevata intensità e minima variabilità.
Quando invece nell’equazione entrano in gioco altri criteri (come la necessità di operare in regime di condivisione di spazi con gli operatori, la possibilità di gestire lotti corti e flessibili e non viene richiesto un ritmo così elevato) allora la scelta deve orientarsi verso una diversa forma di robotica.
Cobot
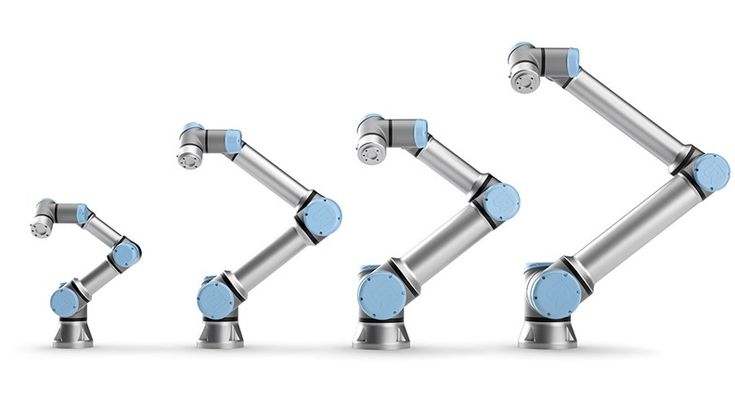
I robot collaborativi hanno nella flessibilità la loro principale caratteristica. Tecnicamente sono delle “quasi macchine”, ovvero delle automazioni a-specifiche che possono venire impiegate con semplicità in molti task diversi e che- in virtù delle safety nativamente integrate – risultano sempre sicure e collaborative per un uso in spazio promiscuo. L’integrazione al polso di EOAT specifico renderà il cobot pronto per movimentare, saldare, pallettizzare, avvitare, assemblare, visionare e testare e, quindi, renderà necessaria un’attenta valutazione del rischio, perché a quel punto il cobot potrà manipolare oggetti potenzialmente pericolosi, taglienti, appuntiti, caldi.
Un cobot quindi non è un investimento congelato nel tempo e nello spazio applicativo di un singolo prodotto, ma può essere riallocato, riprogrammato e installato in luoghi diversi del layout produttivo.
Un’altra caratteristica peculiare è data dalla sicurezza intrinseca. Come detto poc’anzi un cobot Universal Robots è dotato di 17 sistemi di sicurezza, inclusi tempo e distanza di arresto personalizzabili, che ne permettono – in oltre l’80% dei casi - l’installazione anche senza barriere di sicurezza. Questo permette alle aziende di realizzare aree di lavoro aperte, in cui il cobot movimenta, preleva e posiziona oggetti e componenti in compresenza con l’operatore. Un tipo di applicazione di questo tipo richiede un minor costo di installazione e offre un minor consumo di spazio.
Infine, la collaboratività, intesa non soltanto come mera sicurezza, ma anche come semplicità d’uso. I cobot UR possono venire programmati e divenire operativi in meno di 90 minuti e non richiedono specifiche conoscenze di programmazione robotica per dare avvio ad applicazioni di media complessità.
L’automazione collaborativa applicata al pick&place offre quindi numerosi vantaggi.
Innanzitutto di flessibilità, perchè consente di passare con semplicità da un prodotto all’altro. Da un lato perché gli organi di presa sono studiati per un uso plug&play e quindi risultano immediatamente operativi: in caso di cambio prodotto e quindi di riattrezzaggio del cobot, i fermo macchina sono brevissimi.
Dall’altro perché programmare il movimento del braccio robotico è molto semplice: attraverso il teach pendant (quindi con programmazione drag and drop e template ad albero) oppure in free drive, ovvero trascinando il cobot nello spazio lungo la traiettoria desiderata fissando i waypoint lungo il percorso.
In secondo luogo di precisione: la ripetibilità di posizionamento garantita da un cobot permette di posizionare con assoluta affidabilità (per questo tipo di applicazione) ogni oggetto all’interno di un tray, di uno scaffale, di un kit che va costituendosi.
In conclusione
Risponderei così all’implicita domanda del nostro esperto di automazione sulla forma di automazione più adatta per la sua applicazione:
- Serve velocità, precisione estrema, capacità di carico elevata? SCARA
- Serve capacità di gestire cambi prodotto, condividere lo spazio, velocità nella messa in opera? Cobot.
Ogni processo di automazione richiede un investimento. Perché quindi non toccare con mano le potenzialità di una forma di automazione? Perché non metterla alla prova sul campo?
Se vuoi testare i cobot e le loro potenzialità prenota senza impegno una demo: i nostri esperti verranno presso la tua azienda per una dimostrazione dal vivo oppure condurranno online, in live streaming, una dimostrazione delle funzionalità dei cobot per i tuoi bisogni.
