Path manipulation
Let's configure the TCP and toolpath the robot will follow.
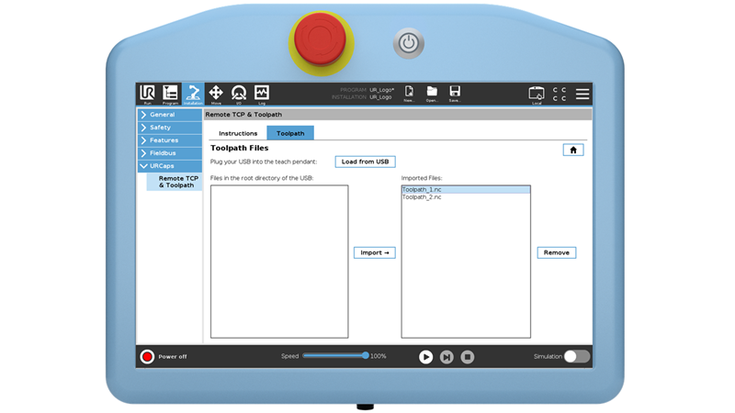
Remote TCP and Toolpath
The Remote TCP & Toolpath URCap makes it easier to program the robot for process applications, such as dispensing, deburring, polishing, etc. First, this URCap allows you to set Remote Tool Center Points (RTCP), where the tool center point is fixed in space, relative to the base of the robot.
Second, it is also able to automatically generate robot motion based on an imported G-code toolpath file. When the robot is required to follow a complex trajectory for a dispensing or deburring application, it is much easier to program the toolpath based on a part model in the CAD/CAM.