Confira as principais novidades da Universal Robots em relação aos robôs colaborativos no começo de 2021 com lançamento de cabos flexíveis e o SW 5.10.
Universal Robots News #1: Cabos Flexíveis e SW 5.10

Como forma de levar a nossos clientes, amigos e parceiros cada vez mais informação sobre as inovações e transformações dos cobots, reunimos algumas das notícias mais importantes sobre as tecnologias de nossa plataforma neste artigo.
Neste artigo, você vai ler sobre o novo cabo flexível compatível com a eSeries e o benefício que este acessório pode trazer para processos de soldagem, paletização e alimentação de máquinas, além de conferir um breve resumo sobre as atualizações do SW 5.10 e as mudanças em algumas funcionalidades do sistema e das configurações de carga, segurança etc. Confira:
Lançamento de cabos flexíveis para eSeries
A Universal Robots agora disponibiliza cabos flexíveis para conexão entre braço robótico e Controlador.
Isso oferece integração com sistemas de 7 eixos, permitindo que o robô seja usado para alimentação de diversas máquinas, soldagem de peças maiores ou paletização com maiores alturas. Os cabos vêm em opções de 6 ou 12 metros.
Benefícios dos novos cabos
- Ampliação do espaço de trabalho;
- Resistentes à movimentação
- Montagem de braço robótico em trilho ou sistema de 7 eixos;
- Alimentação de múltiplas máquinas;
- Soldagem de maiores peças;
- Aplicação em paletes com alturas acima de 1400mm.
Como funciona?
O Base Flange Connector permite fácil troca de cabos e uma manutenção mais fácil do robô colaborativo.
Com essa funcionalidade, expandem-se as opções de cabos disponíveis para a aplicação. A e-Series da Universal Robots vem com o Base Flange Connector como padrão, e sistemas mais antigos poderão ter o benefício adicionado posteriormente.
Os robôs da série e-Series são:
- UR3e
- UR5e
- UR10e
- UR16e
Lista de aplicações possível com os cabos flexíveis
As principais aplicações beneficiadas com maior mobilidade garantida pelos cabos flexíveis para os braços robóticos colaborativos são:
- Montagem;
- Manipulação de objetos e paletização;
- Alimentação de máquina;
- Distribuição de fluidos;
- Inspeção de qualidade;
- Soldagem;
- Acabamento.
Dimensões
O guia completo com a descrição do material vai com o manual enviado junto ao cabo. Abaixo, as principais definições de tamanho:
- Comprimento: 6 ou 12 metros;
- Diâmetro: 13,4 milímetros;
- Raio de dobra dinâmica: até 8 vezes o diâmetro;
- Ciclos de dobra: até 5 milhões.
Patch de atualizações de software SW 5.10.X.X








Foram lançados recentemente os patches SW 5.10.1 e SW 5.10.0. Abaixo, um breve resumo sobre quais as novidades:
SW 5.10.1
Versões atualizadas:
- UR Software Update: 5.10.1
- URCap Software Platform:
- URCap API: 1.12.0
- URCap SDK: 1.12.0
- URSim Linux: 5.10.0
- URSim Virtual Machine: 5.10.0
- User Manuals: 5.10.0
- Support Log Reader: 3.10.33
Correção de bugs
POLYSCOPE GUI
- Otimização de uso barramento de memória para liberar mais espaço para aplicações de terceiros.
CONTROLADOR
- Uso de texmsg/varmsg para correção de vazamento de memória sob situações de alto processamento. Caso o cenário seja encontrado, um aviso de “GUI Communication High Load” será exibido no log do controlador.
SW 5.10.0
Versões atualizadas:
- UR Software Update: 5.10.0
- URCap Software Platform:
- URCap API: 1.12.0
- URCap SDK: 1.12.0
- URSim Linux: 5.10.0
- URSim Virtual Machine: 5.10.0
- User Manuals: 5.10.0
- Support Log Reader: 3.10.32
Mudanças-chave
- Suporte de software para 3PE Teach Pendant.
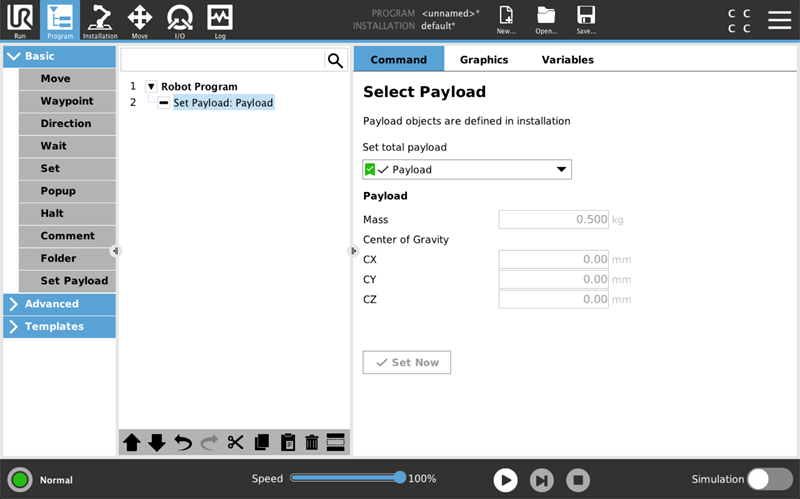
- Configurações de payload/carga melhoradas: Foram adicionados payloads em pre-set, configurações de inércia, visualização de carga e um novo nó de seleção de cargas, simplificando as operações com cargas variáveis.
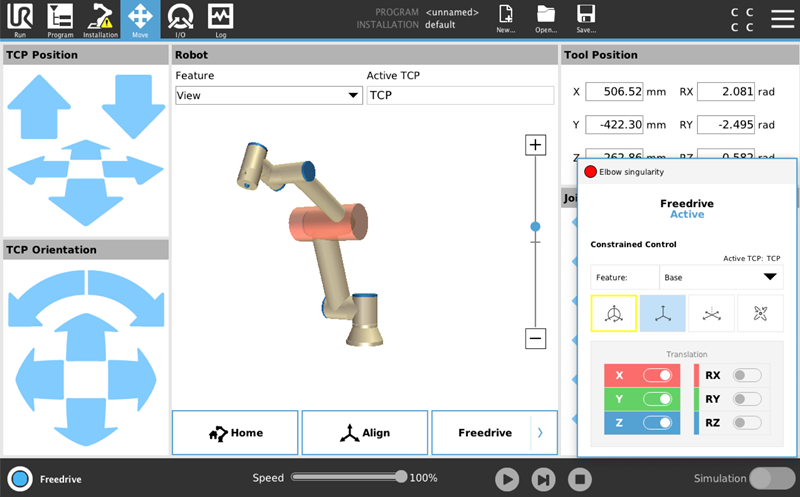
- Visualização de singularidades em Freedrive: Ajuda o usuário a entender e evitar singularidades.
- Validação do URCaps: Usuários são prevenidos antes da instalação de URCaps incompatíveis ou corrompidos.
- Cybersecurity: Várias novas configurações de segurança para prevenir acesso não autorizado ao robô e execução de arquivos conectados pelo USB.
- Intérprete de runtime do URScript: Permite a execução de instruções definidas em runtime a partir de programas primários.
- Otimização de controle de motor em baixa velocidade: Aumento na estabilidade do path tracking em movimentos de baixa velocidade.
POLYSCOPE GUI
Abaixo, uma descrição um pouco mais detalhada sobre as mudanças no SW 5.10.0.
Suporte de software para 3PE Teach Pendant
Conserta um erro ativado quando um interruptor de modo de seleção externa é usado com o 3PE Teach Pendant no SW 5.9.3 e 5.9.4. Clientes que já possuem o 3PE Teach Pendant precisam atualizar o software do braço robótico para 5.10.0 ou 5.10.1.
*O Teach Pendant da Universal robots com dispositivo de habilitação com 3 posições embutidas é vendido separadamente.
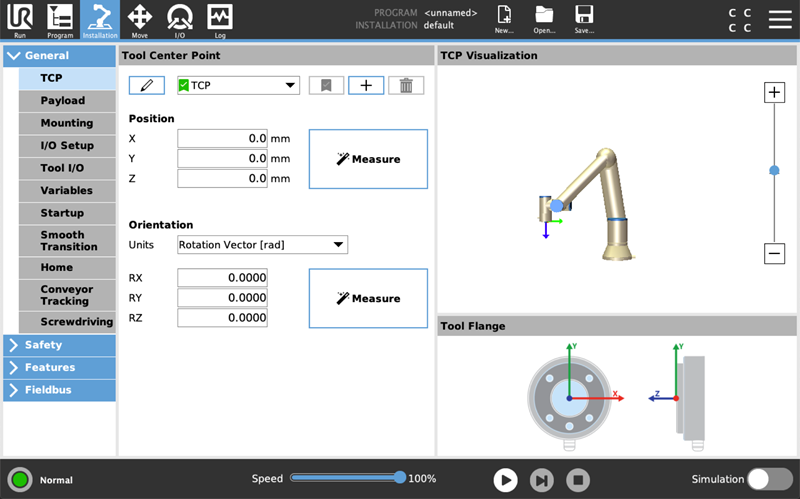
Payload/carga
Essa versão inclui uma nova tela de instalação para configuração de carga. A tela “Payload” substitui então a seção de carga que era parte da tela TCP.
Payloads agora podem ser criados independentemente da TCP. Além disso, também há a possibilidade de se especificar uma matriz de inércia customizada.
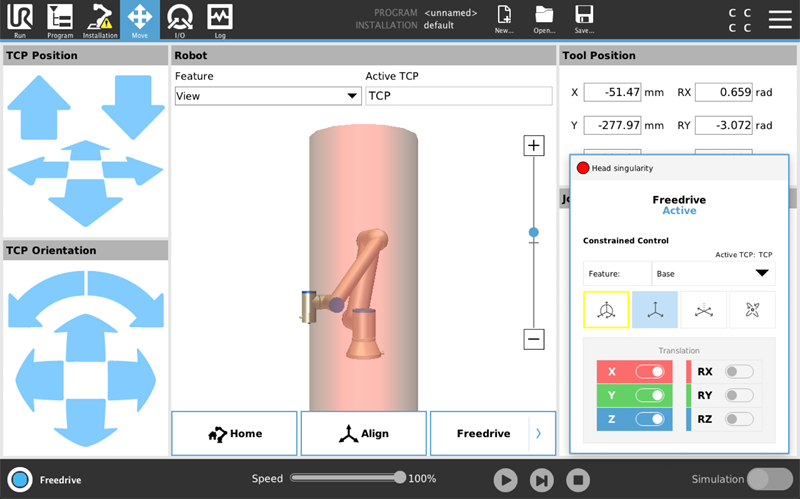
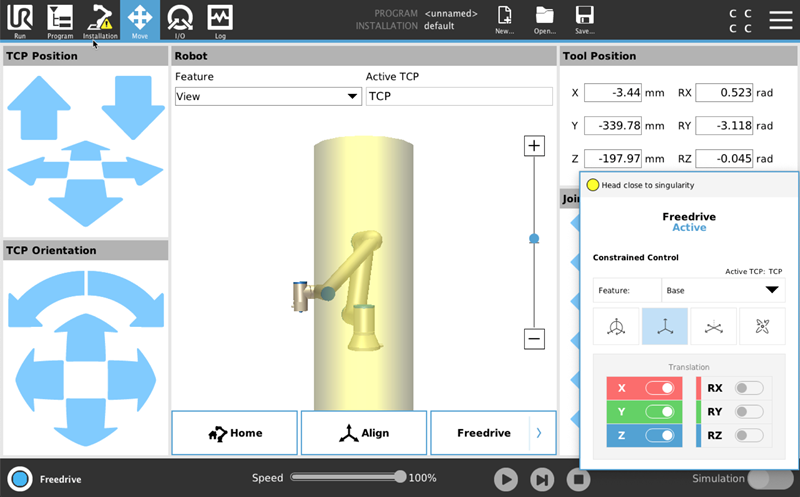
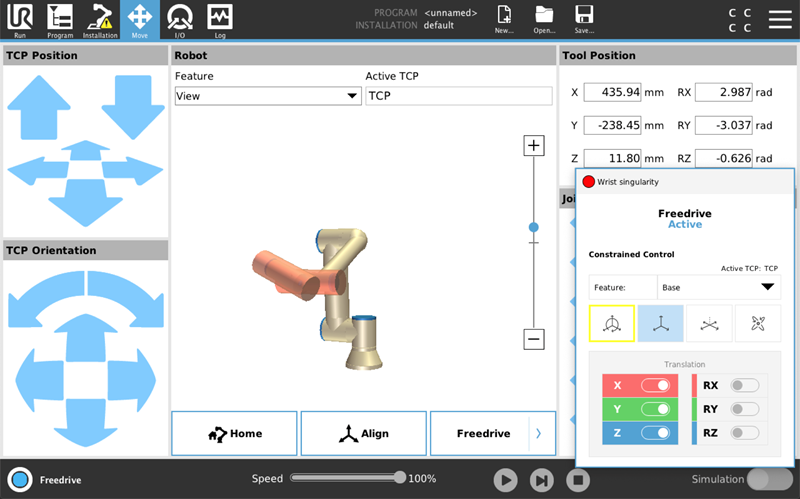
Visualização de singularidades em Freedrive
Ao usar o Freedrive, novas formas aparecem nos gráficos em 3D do Move Tab.
Essas formas indicam quando o robô está em singularidade (vermelho), próximo da singularidade (amarelo). Também existem formas destacando juntas/eixos que estão causando diferentes tipos de singularidades (cotovelo, cabeça e pulso).
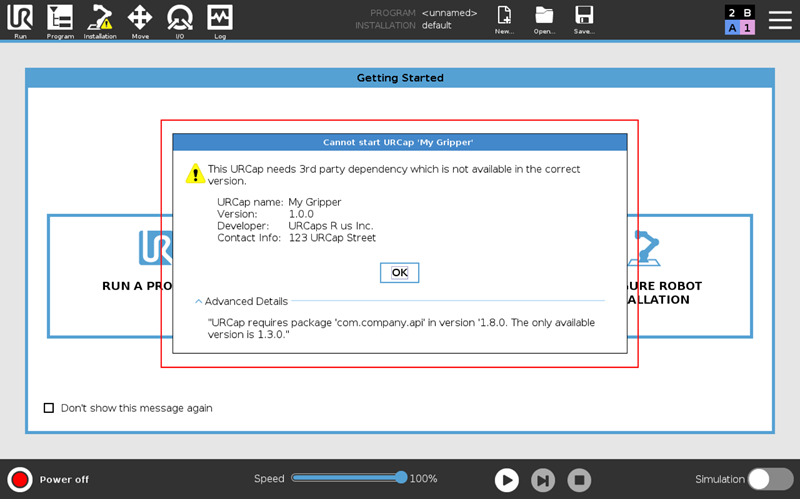
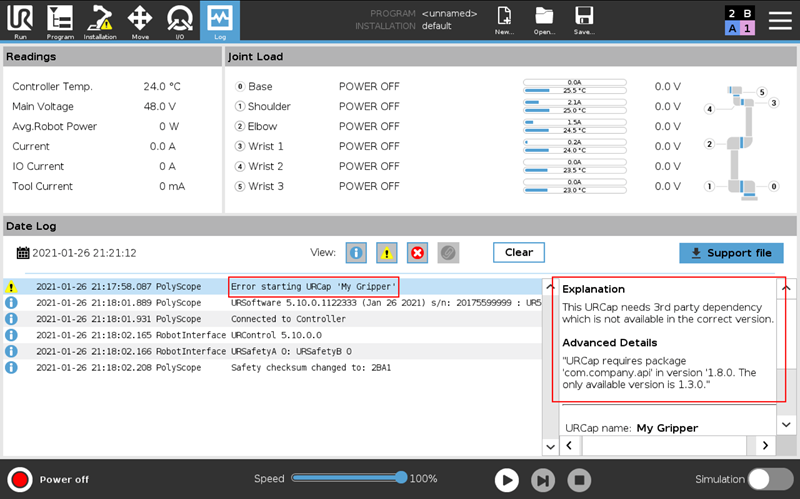
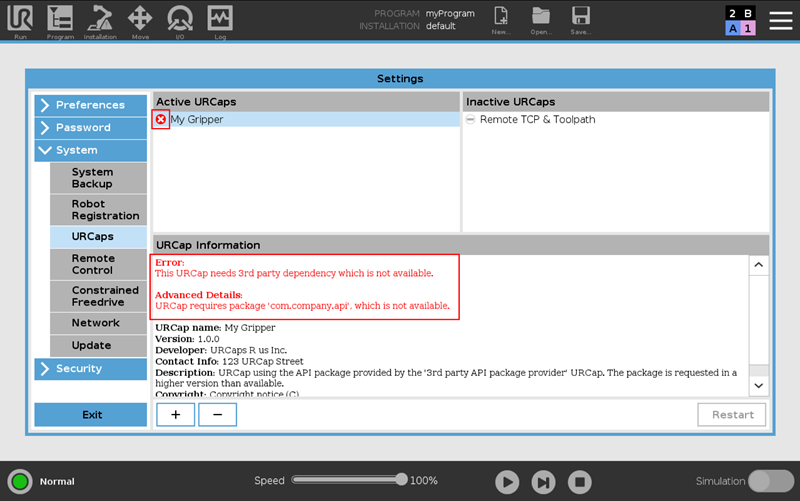
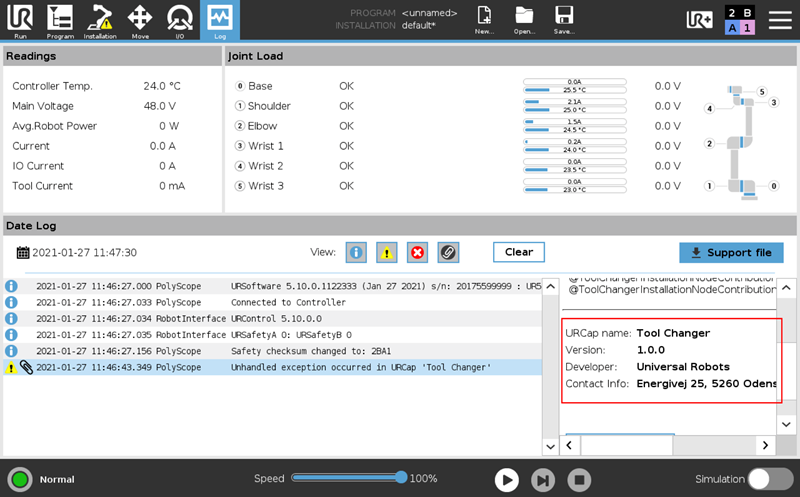
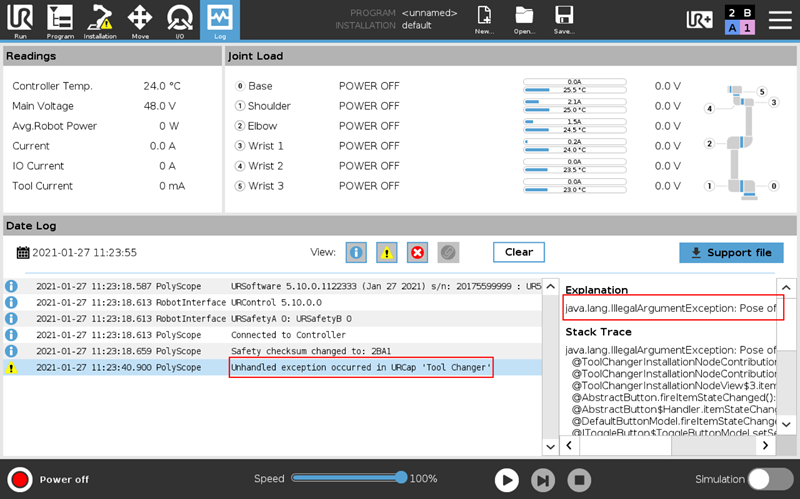
Validação do URCaps
Prevenção na instalação de URCaps incompatíveis ou danificados. Os usuários agora são avisados antes que completem a instalação com um URCaps que não funcionará no braço robótico colaborativo. As condições para isso são:
- O URCap exige uma versão mais moderna do URCap API (comparado à versão oferecida pelo PolyScope);
- O URCap não é compatível com a série de robôs (geração) do usuário;
- O arquivo do URCap (.urcapfile) tem um erro interno ou não é um arquivo v´laido;
- Um URCap idêntico já está instalado sob outro nome de arquivo;
- O URCAp não pode ser instalado por erros no arquivo ou no sistema de arquivo (como falta de espaço de disco)
É importante observar que esse sistema de prevenção de instalação só funcionará com URCaps que possuem compatibilidade especificada. Nos casos em que os URCaps não têm isso descrito, pode ser que não sejam detectadas algumas anomalias.
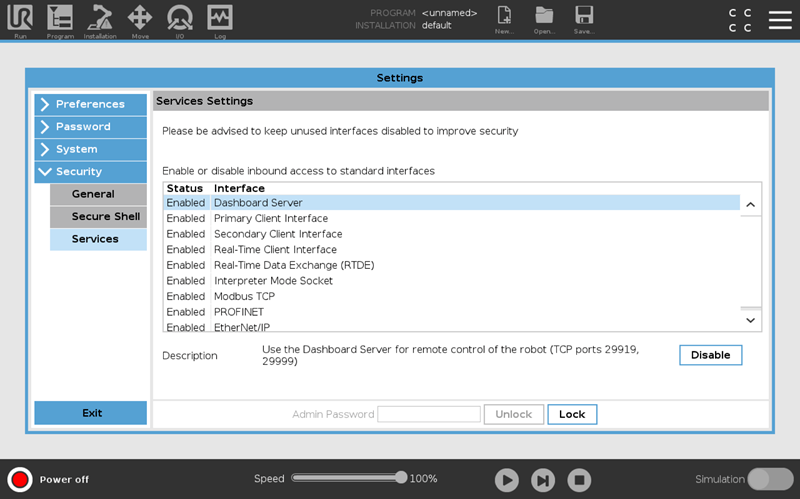
Segurança
Foram adicionadas novas configurações de segurança de cada robô. Os usuários agora podem definir e mudar uma senha de Admin equivalente à senha raiz usada para acessar o sistema Linux do braço robótico colaborativo. Além disso, três novos painéis de segurança foram adicionados às configurações do sistema.
Otimização de controle de motor em baixa velocidade
- Essa melhora é aplicada aos braços robóticos colaborativos construídos com PolyScope versão 5.4.0 ou maior.
- A “revisão de calibração” deve ser maior que a v12.0. Usuários podem fazer essa conferência no arquivo robot_calibration_summary.txt.
A Universal Robots está sempre buscando novas atualizações e soluções de ponta para tornar os braços robóticos colaborativos cada vez mais úteis nas rotinas produtivas de fábricas em diferentes segmentos ao redor do mundo.
Para mais informações sobre nossos produtos e serviços, acesse nosso site.
Escritório
- Universal Robots Brasil
- Rua José Versolato, nº 111
- 09750-730 São Bernardo do Campo - SP
Fale conosco: 0800 777 0442