
Building AI is hard. Running it in the factory is harder.
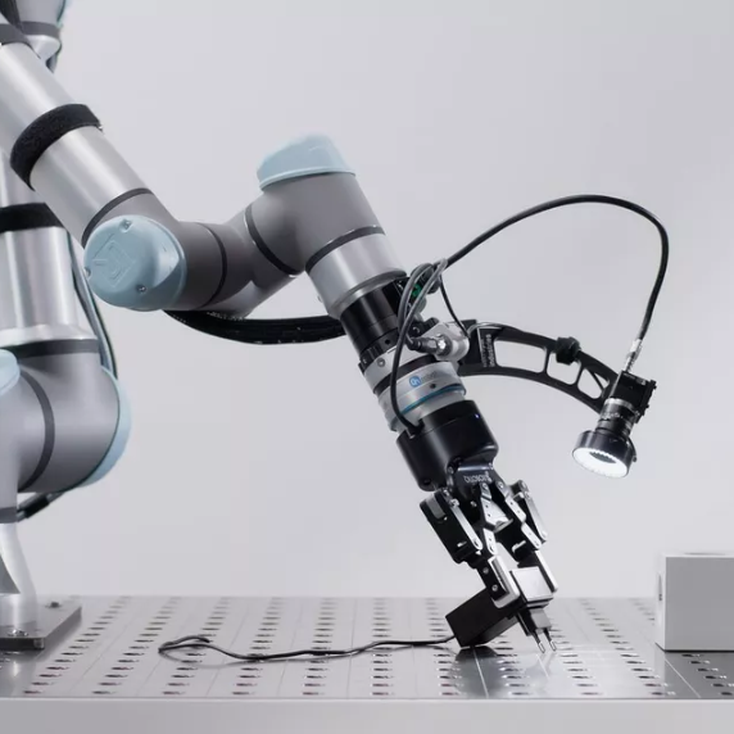
AI models are typically developed and validated in controlled environments — simulations, lab setups, or offline pipelines where physics is simplified, sensors are clean, and timing is flexible.
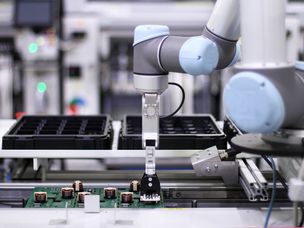
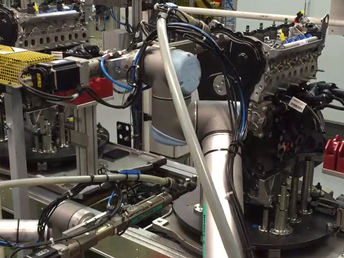
The factory operates under a different reality. Robots must respond in real time. Motion, force, vision, and state are tightly coupled. Contact dynamics evolve continuously. Sensors introduce noise and latency. Safety systems intervene by design.
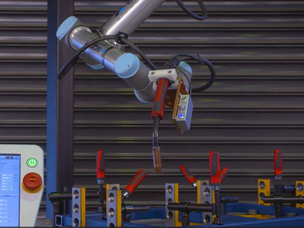
In this environment, every control cycle must be deterministic (without retries, stalls, or dropped frames) because physical systems do not pause or reset.