安全家园
| 描述 |
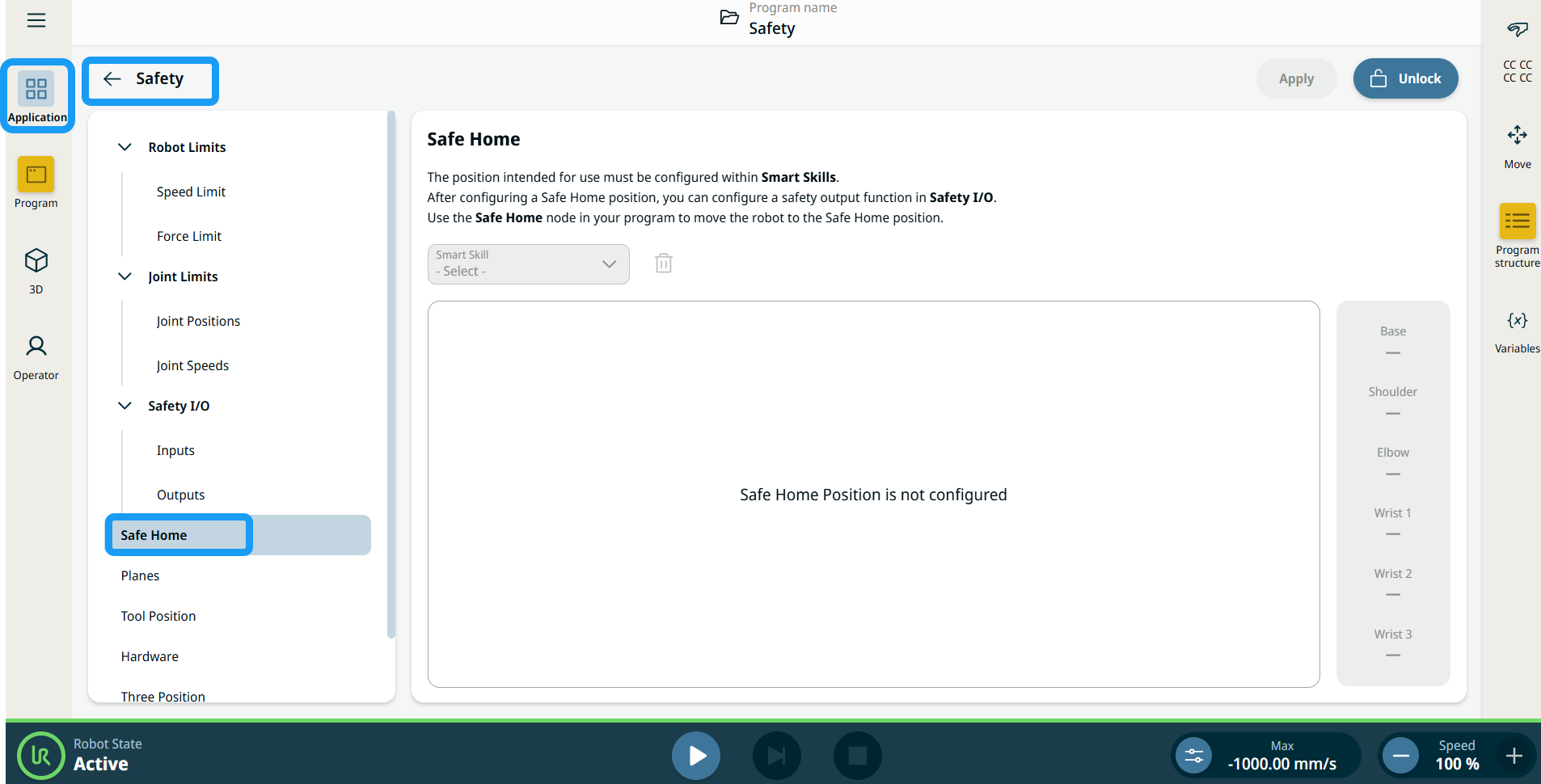
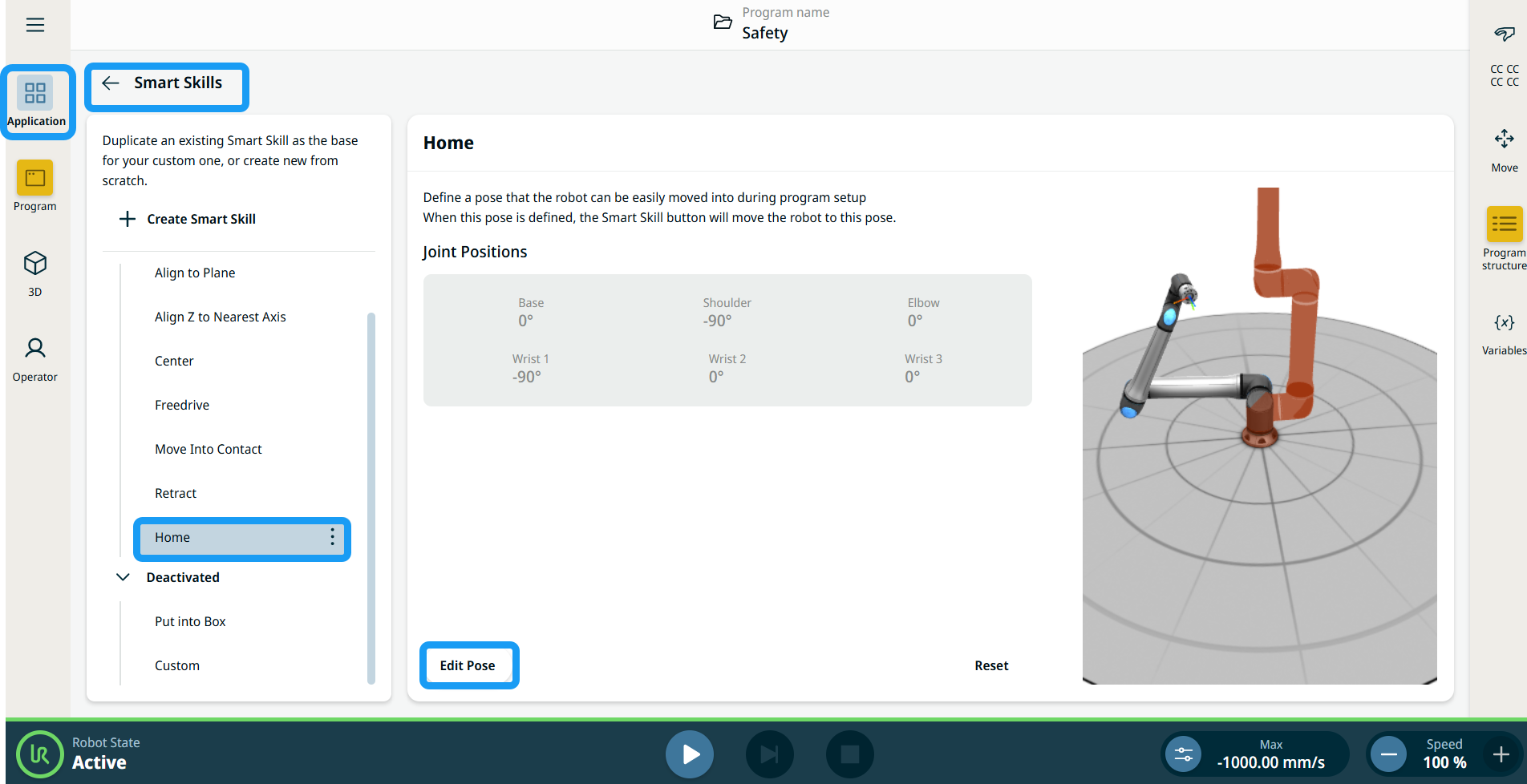
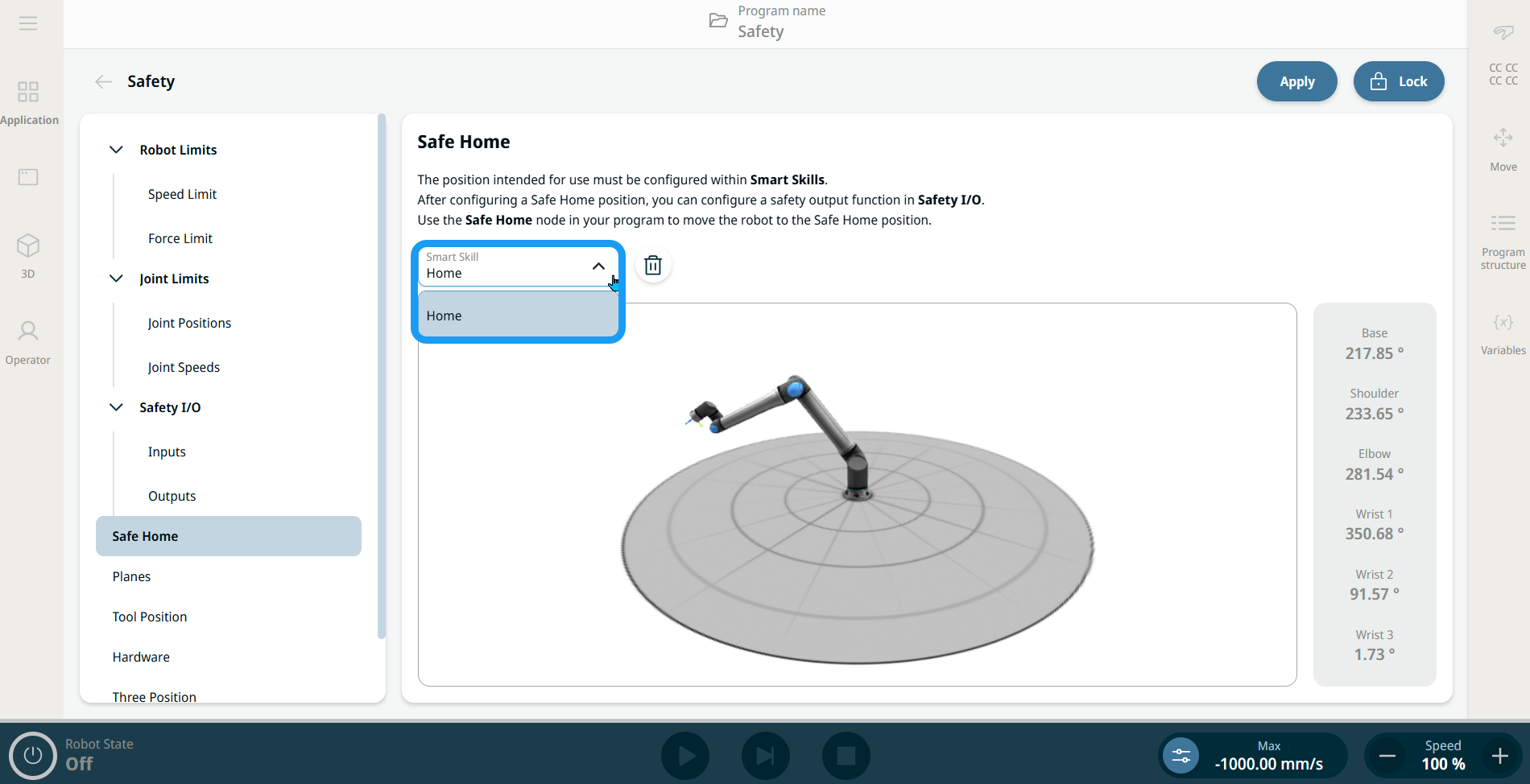
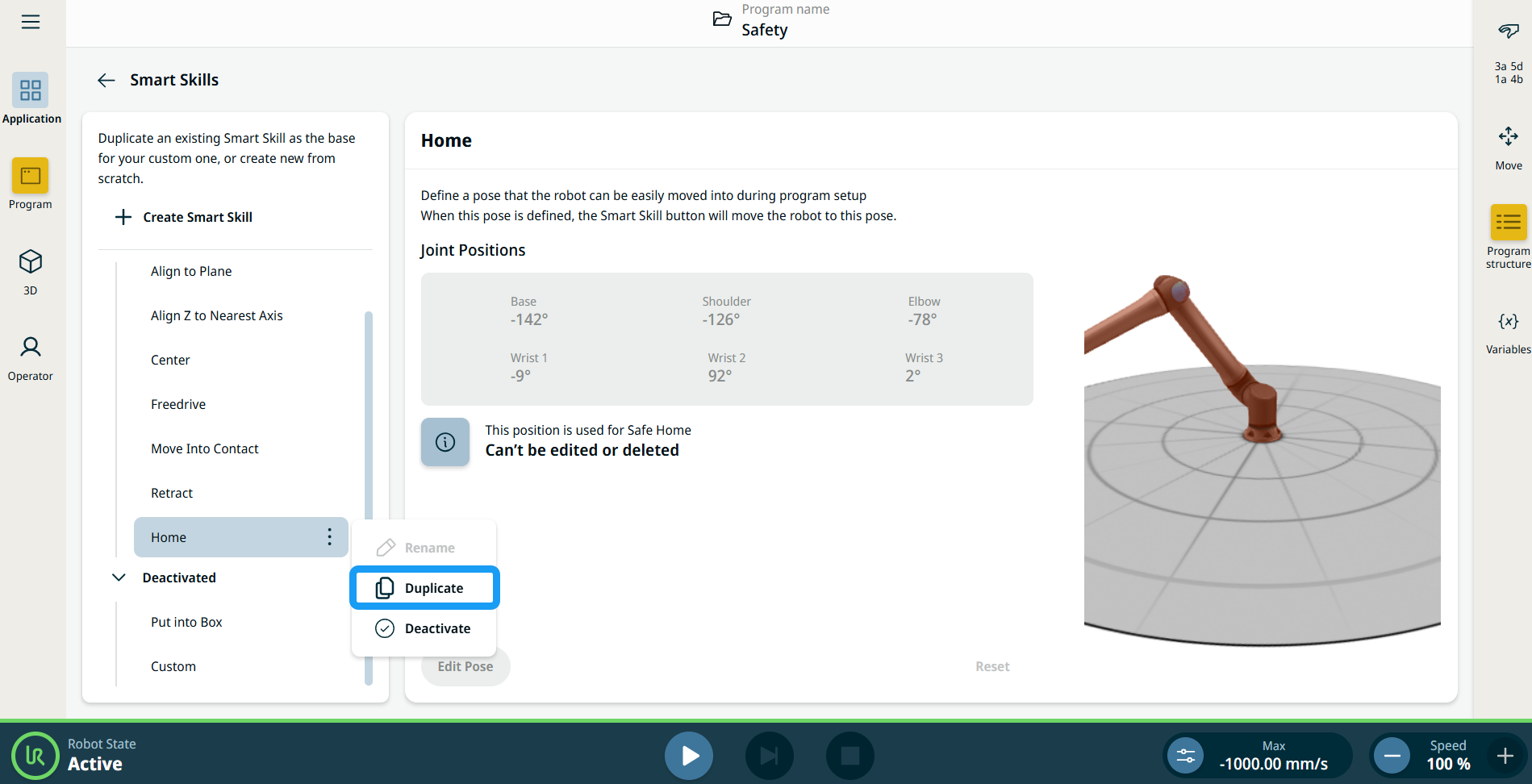
安全原點係一種 PolyScope X 的功能,使用者可用以定義機器人到達所配置的安全原點位置時啟動的安全相關輸出。 使用者在可用的智慧技能位置(可指定為安全原點位置參考)下拉式選單中選擇原點。
|
|
存取安全原點 |
|
|
|
|
|
|
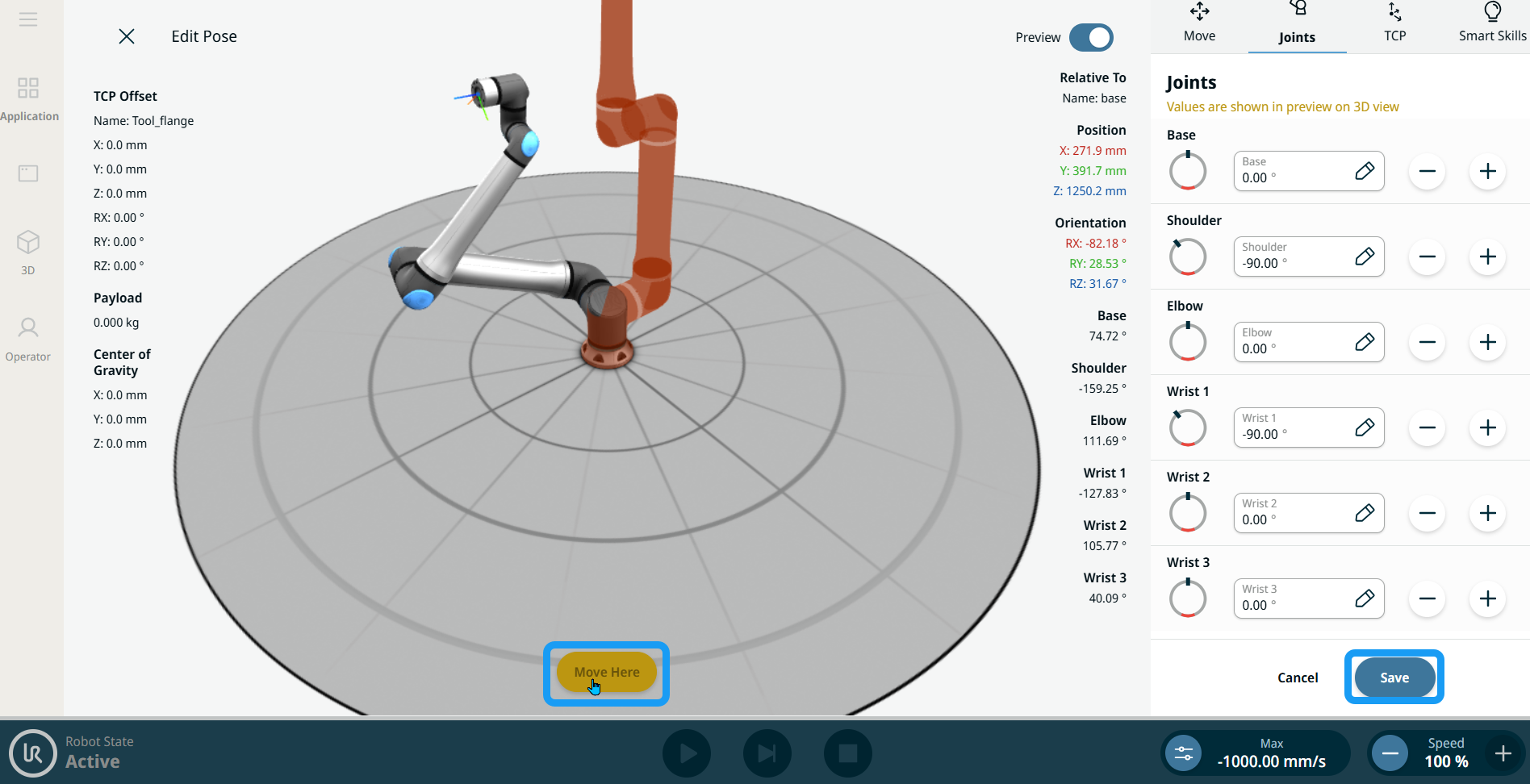
若選取「Position Smart Skill」作為安全歸位點的位置參考:
|
|
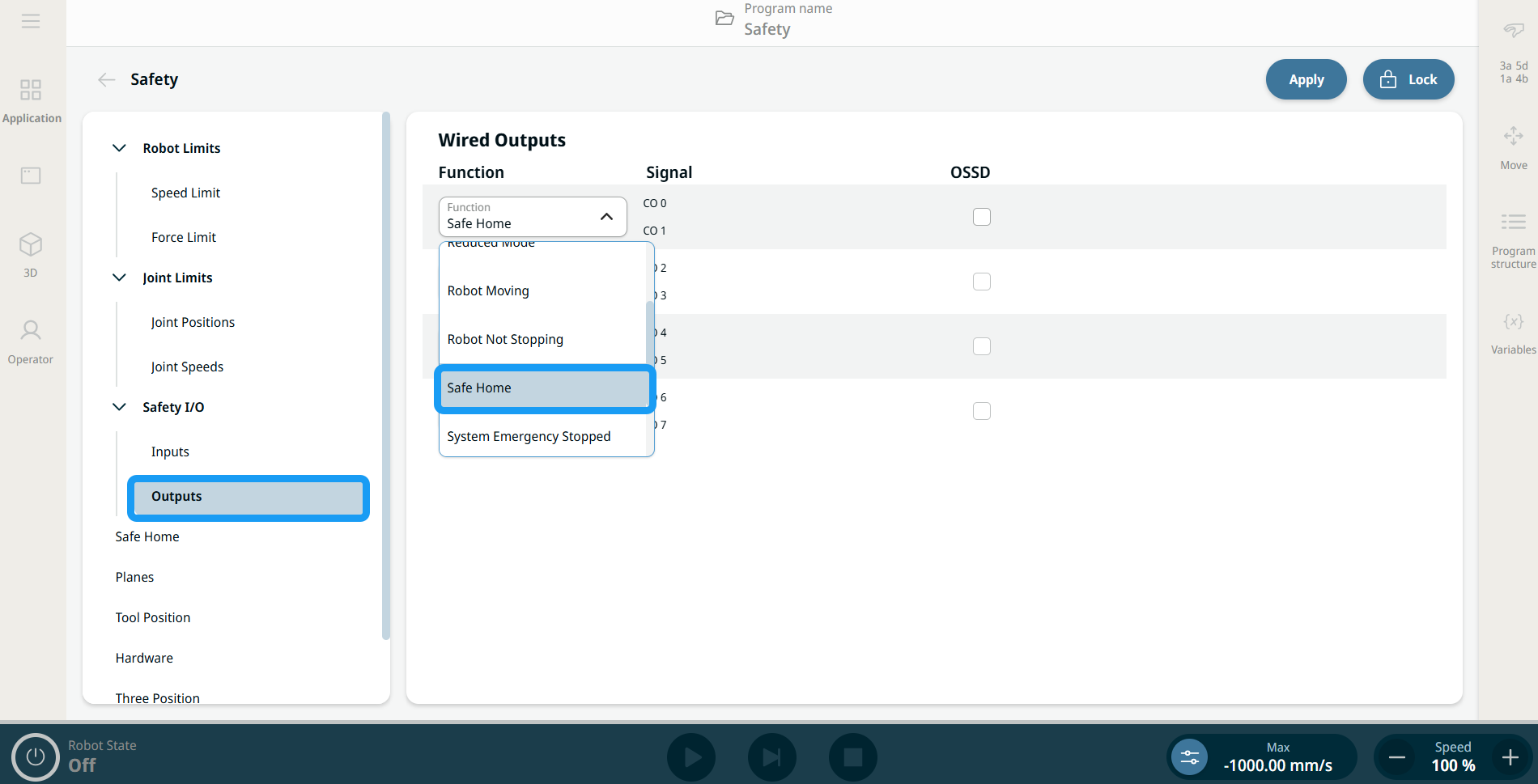
輸出中的安全原點功能 |
若在安全中將原點位置指派為智慧技能位置,則安全輸出功能下拉式選單將包含安全原點作為新功能指派。 在安全 I/O 輸出中的「功能」欄位內選擇安全原點。
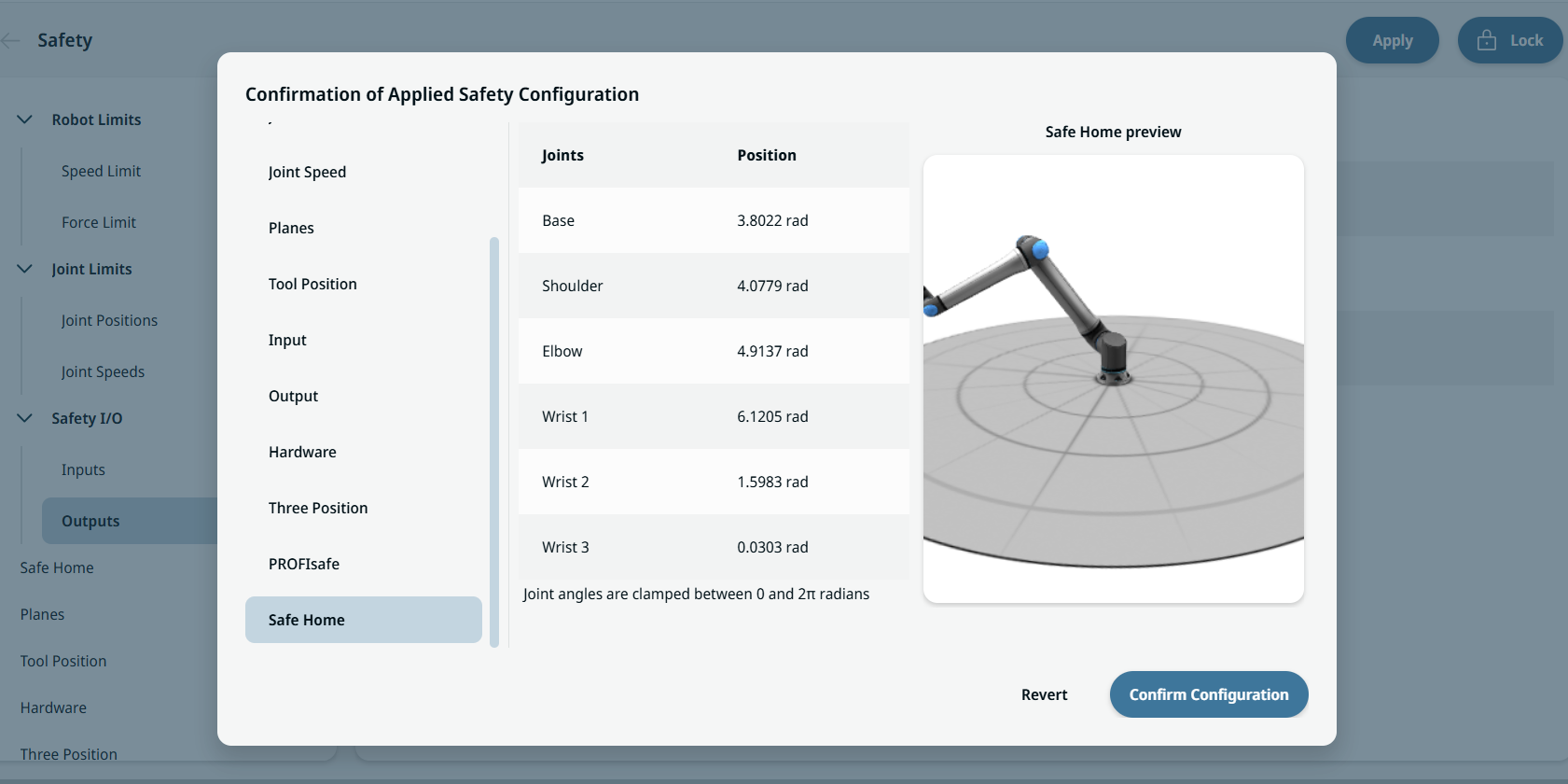
安全原點可顯示於確認使用的安全性配置概覽對話方塊中的功能指派表中。
|
|
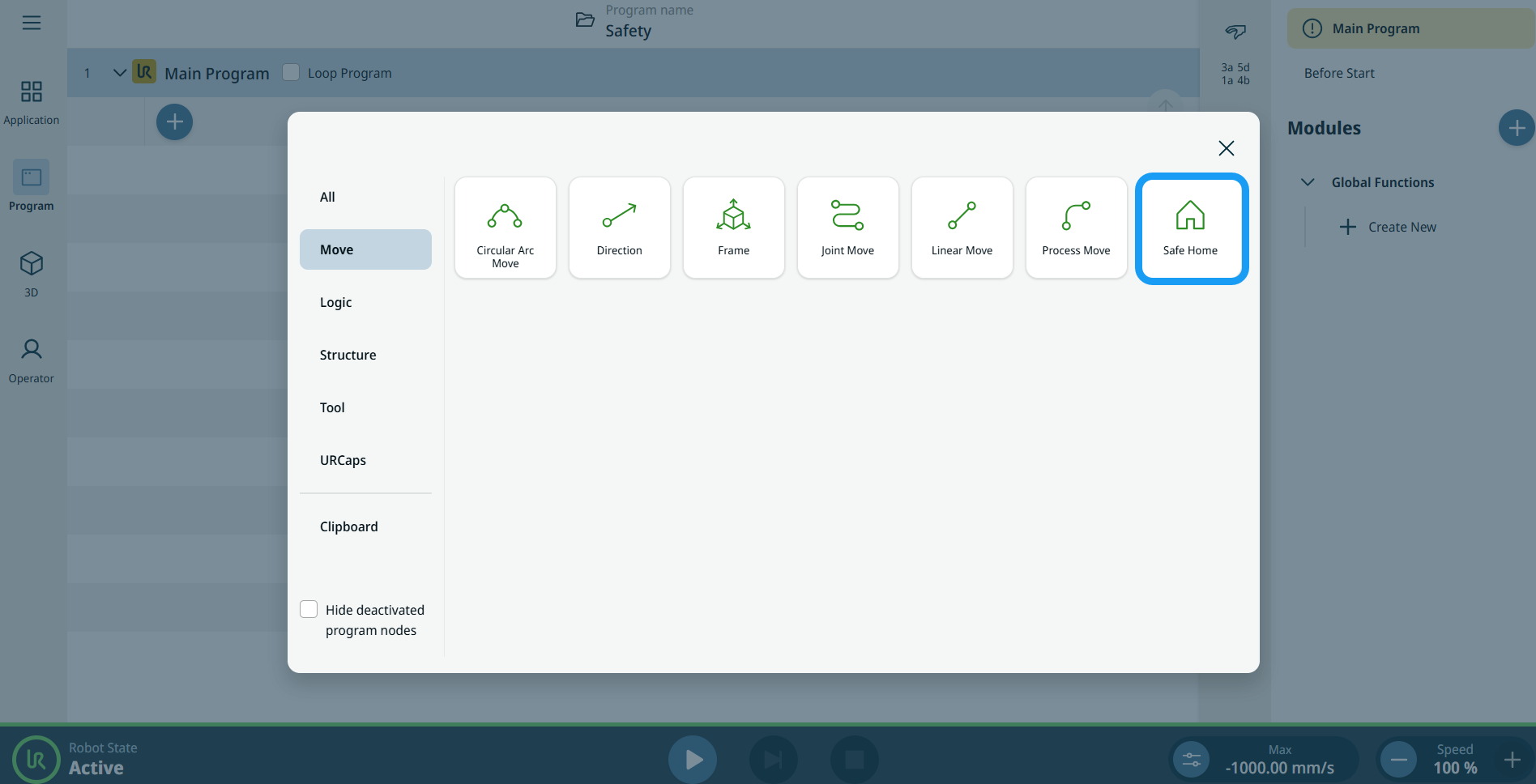
安全原點作為程式節點 |
安全原點程式節點位於命令節點內的移動節點類別下。 此節點用於命令機器人移動到其預先定義的安全原點位置,該位置是在安全原點的安全應用設定中配置的。
若新增節點時未在安全中配置安全原點位置,則會將該節點標為黃色。

點按刪節號圖示
|
 時,安全原點命令節點將含有運動設定檔選項及其他進階設定。
時,安全原點命令節點將含有運動設定檔選項及其他進階設定。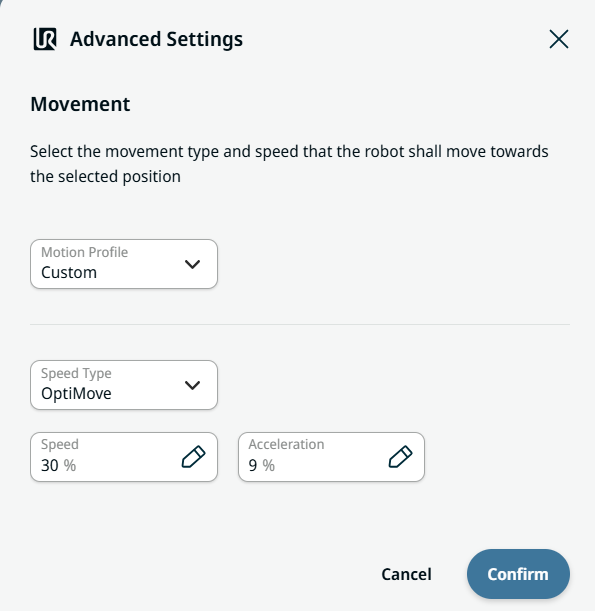
| 進階設定 |
使用者可在進階設定中使用兩個標籤頁和兩個欄位建立運動設定檔:
運動設定檔功能可讓使用者在移動節點中設定預先定義的運動設定檔:關節移動、線性移動、圓弧移動、流程移動和方向。 自訂運動設定檔可讓使用者在移動節點中定義移動資料。 在速度類型欄位中, OptiMove 是預設選項。 若您希望以每秒度或每秒毫米為單位輸入速度和加速度,請選擇「 Classic」的 運動模式。 以百分比形式指定 OptiMove 設定,以簡化使用和設定。 使用者可在速度標籤頁中配置偏好的速度百分比,以將目標速度設為機器人最大速度能力的百分比。 使用者可在加速度標籤頁中配置偏好的加速度的百分比,以將加速和減速期間的目標扭矩限制設為機器人最大功率的百分比。
|