反向驱动
|
If the robot arm is close to colliding with something, you can use the backdrive function to move the robot arm to a safe position before (re)initializing it.
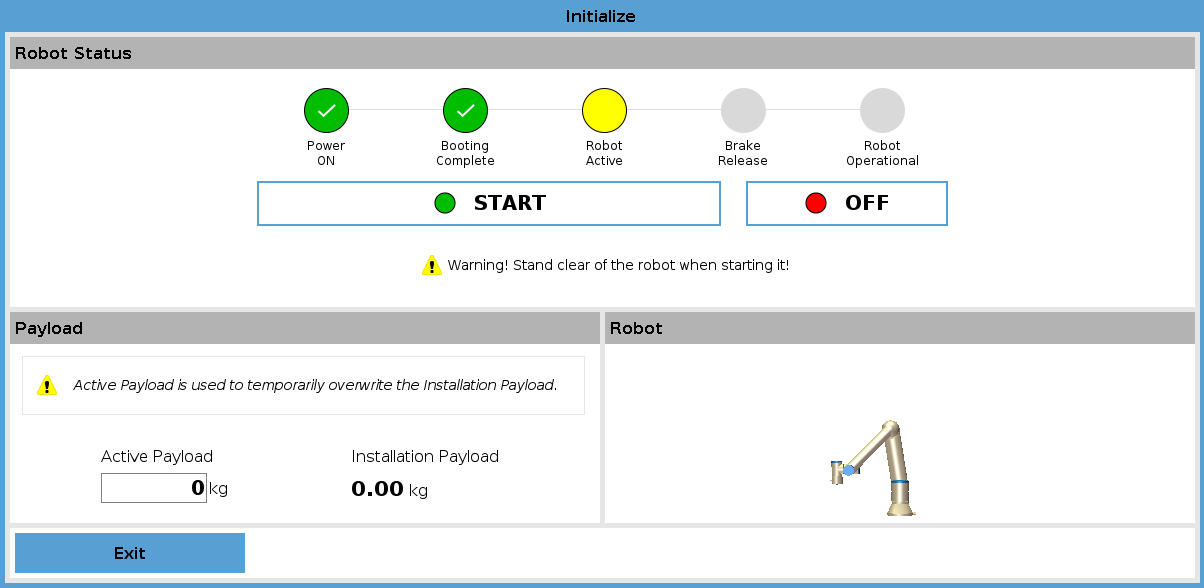
图 3.5。 Robot status and payload information in the teach pendant.
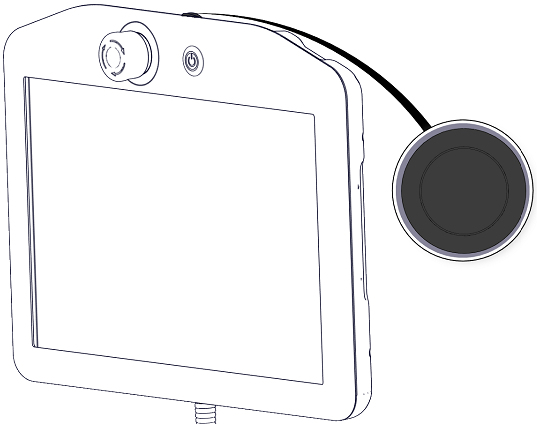
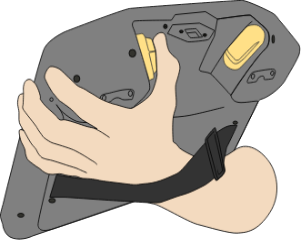
Figure 3.6. Freedriving a standard TP and 3PE TP.
|
|
The robot arm is “heavy” to move around in Backdrive, so efort is required to move the joints.
您必须在所有关节上测试“反向驱动”模式。
|
安全设置 验证机器人安全设置是否符合机器人安装风险评估。 其他安全输入和输出仍在起作用 检查哪些安全输入和输出处于激活状态,并且可以通过 PolyScope 或外部设备触发。 备份数据 See section Backup of Data
|