配置路点
| 描述 |
根据机器人程序中路点的设置、应用和位置,可以采用不同的方式配置路点。
|
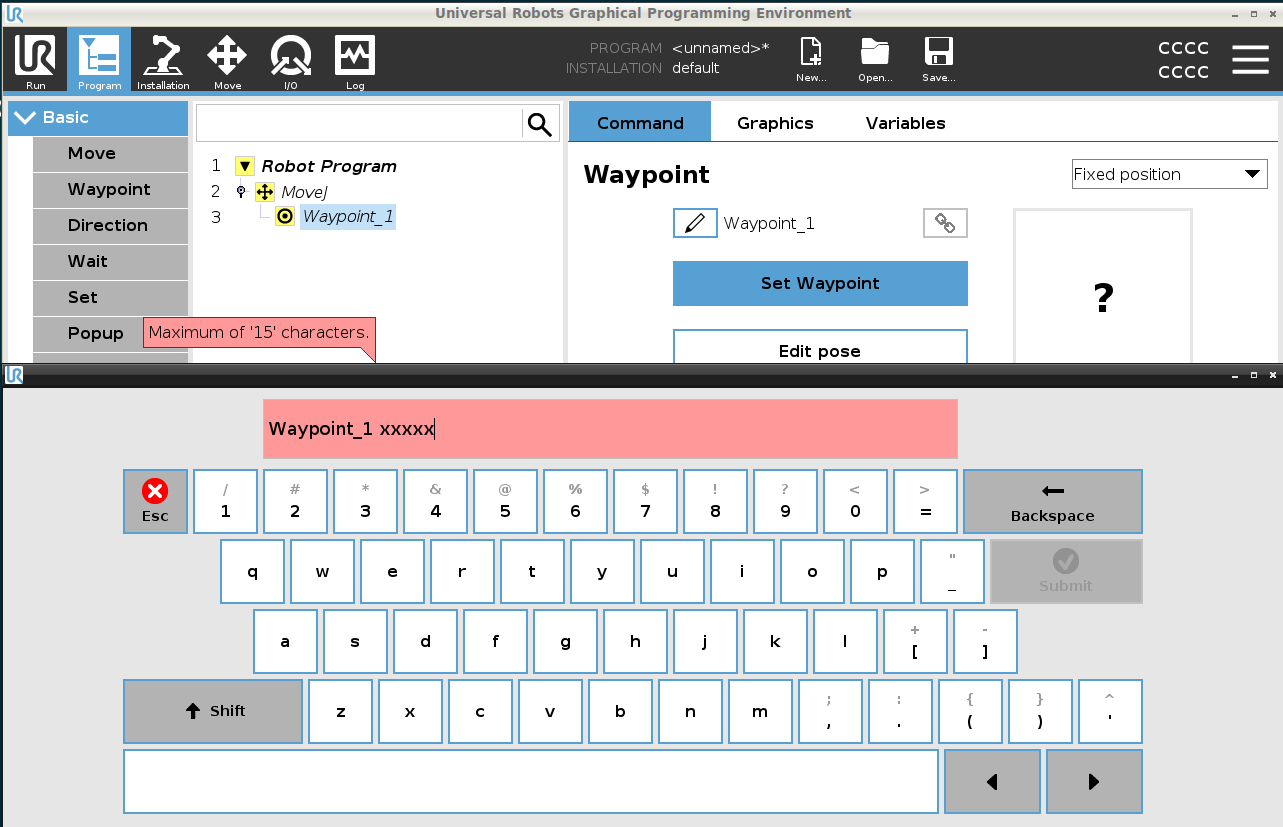
| 为路点命名 |
当您将路点添加到机器人程序时,路点会自动获得一个唯一的名称。 用户可以更改路点的名称。
|
| 命名路点 |
|
| 提示 |
在大型机器人程序中,您通常会有 50 多个路点,因此请建立一个对您有意义的命名规则。
|
| 链接路点 |
通过选择链接图标,路点被链接并共享位置信息。
|
| 详细信息 |
其它路点信息(比如交融半径、工具/关节速度以及工具/关节加速度)针对单个路点配置,即使它们可能被链接。
|
| 在此点停止 |
您将机器人程序配置为在此路点停止。 机器人在到达此路点之前会减速,并继续前往下一个路点。
|
| 使用“在此点停止” |
|
| 提示 |
这有利于使机器人移动到精确位置。
|
| 用例 |
当您希望将机器人从焊接或机床管理应用中移开时。
|
| 交融半径 |
您可以添加交融半径,以交融机械臂在路点之间的移动。 请访问此链接,查看对交融的详细说明。
|
| 使用“交融半径” |
当您将交融添加到路点时,路点之间的过渡会更加流畅和高效。 这会使机械臂的运动更加顺畅,但并不适用于所有机械臂移动。
|
| 提示 |
如果您使用多个路点来引导两点之间的过渡,可以交融中间的路点,使整体移动更顺畅、更高效。
|
| 使用共享参数 |
这是路点的默认设置。 这些设置是从父“移动”命令复制而来。
|
| 用例 |
当父“移动”命令中没有更改关节速度和关节加速度时使用。
|
| 关节速度/加速度 |
您可以修改“移动”命令中每个路点的关节速度和加速度。
|
| 修改关节速度或加速度 |
|
| 用例 |
如果您创建一个码垛程序,那么您可以在程序放置物体时使路点移动得慢一些,而在移动去拾取另一个物体时移动得快一些。
|
| 时间 |
您可以更改到达此路点所需的时间。 最大值为 21.600 秒/6 小时。 |
| 以秒为单位添加时间 |
现在需要 [s] 才能将机械臂移动到此路点。
|
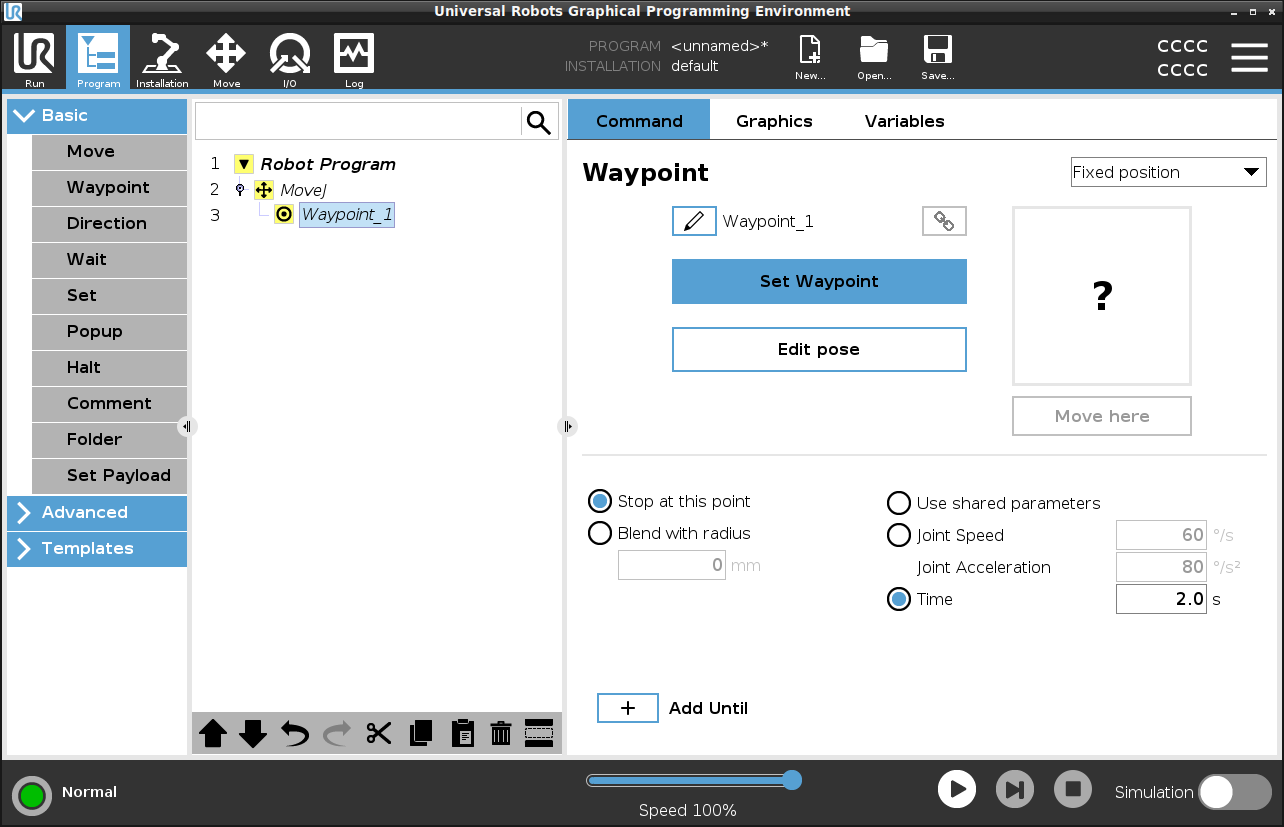
| 添加 Until |
“添加直到”将为您提供许多不同的选项来配置路点。
|
|
步骤 |
请点击链接添加 Until 查看分步说明。
|
