交融
| 描述 |
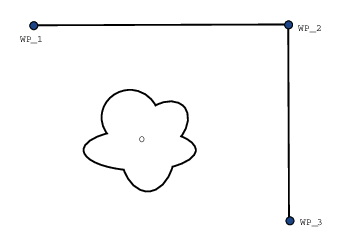
交融使机器人能够在两个轨迹之间平顺过渡,而不会停在它们之间的路点处。 因此,机器人程序的运行速度将加快。
有关交融的其他信息,请参阅以下章节:
|
| 描述 |
交融使机器人能够在两个轨迹之间平顺过渡,而不会停在它们之间的路点处。 因此,机器人程序的运行速度将加快。
有关交融的其他信息,请参阅以下章节:
|