交融参数
| 描述 |
交融使机器人能够在两个轨迹之间平顺过渡,而不会停在它们之间的路点处。 交融会使机器人程序运行得更快,因为当您在轨迹之间创建平滑过渡时,可以避免减慢轨迹之间的加速度。
|
|
除了路点之外,多个参数也会影响交融轨迹。
46.1: 在 |
|
|
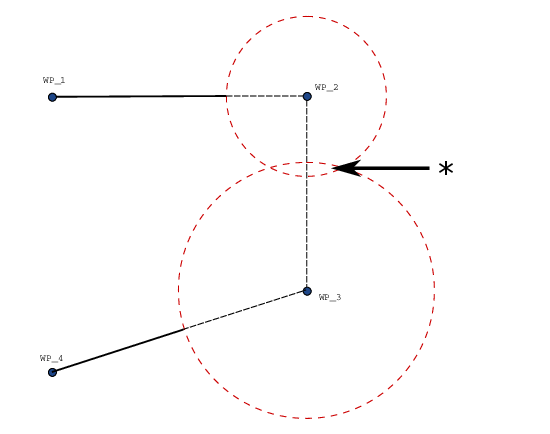
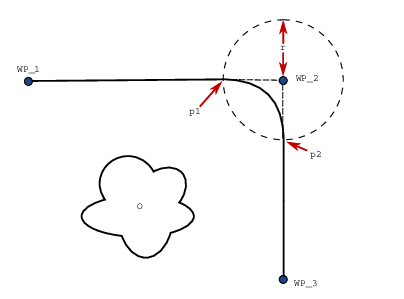
如果设置了交融半径,机器手臂轨迹即会绕过路点从其周围经过,以使机器手臂不会停在该点。
交融不能重叠,因此不能设置一个与上一个路点或下一个路点的交融半径重叠的交融半径。 如果两个交融有重叠,则“日志”选项卡中会记录一条警告。 有关更多信息,请参阅“日志”选项卡。 对于平滑运动和 OptiMove,交融半径将动态调整,不会记录任何警告。
|