添加 Until
| 描述 |
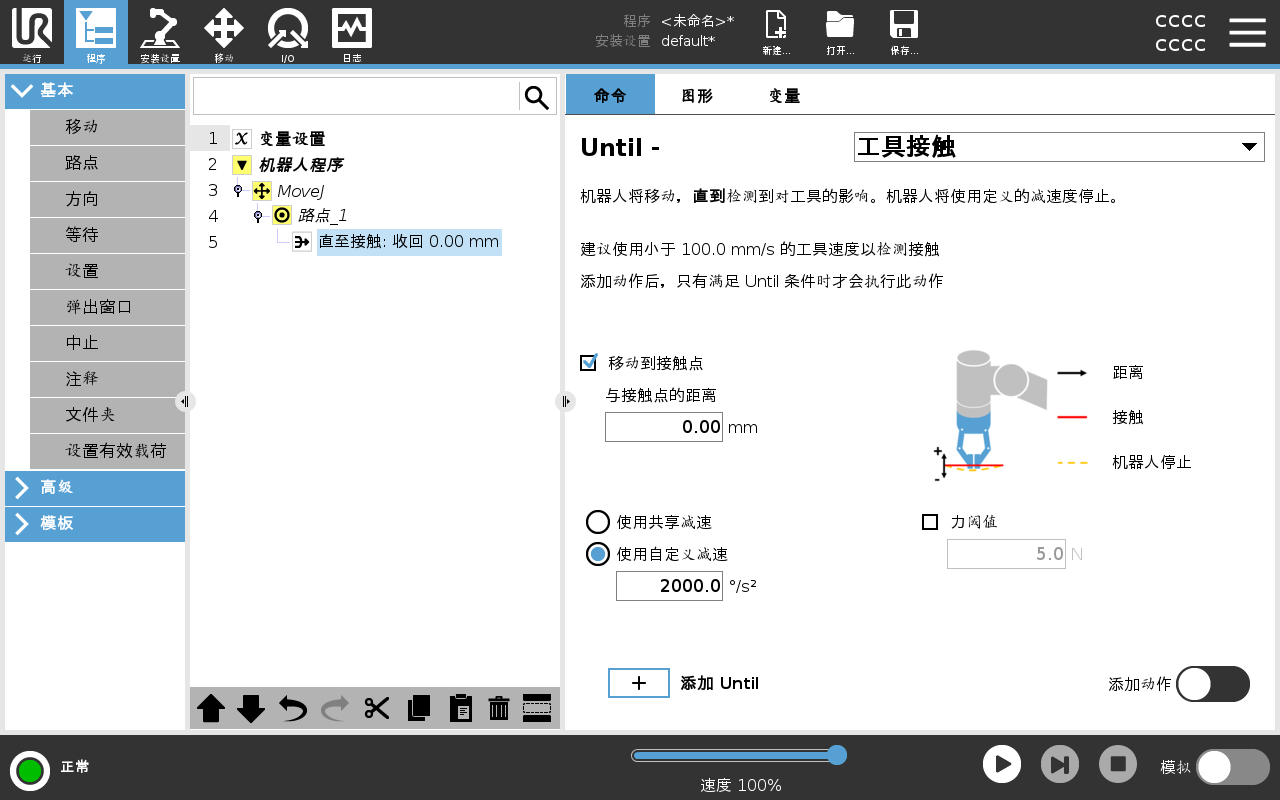
程序节点直到定义运动的停止条件。 您可以从“方向”和“路点”命令添加“直到”节点。 您只能向 MoveL 和 MoveP 添加方向节点。 机器人沿着路径移动并在检测到接触时停止。
您可以为单个移动添加多个停止条件。 满足第一个 Until 条件时,运动停止。 您可以依次添加多个“添加直到”,因为在一个动作完成或执行之前,必须满足多个条件。
|

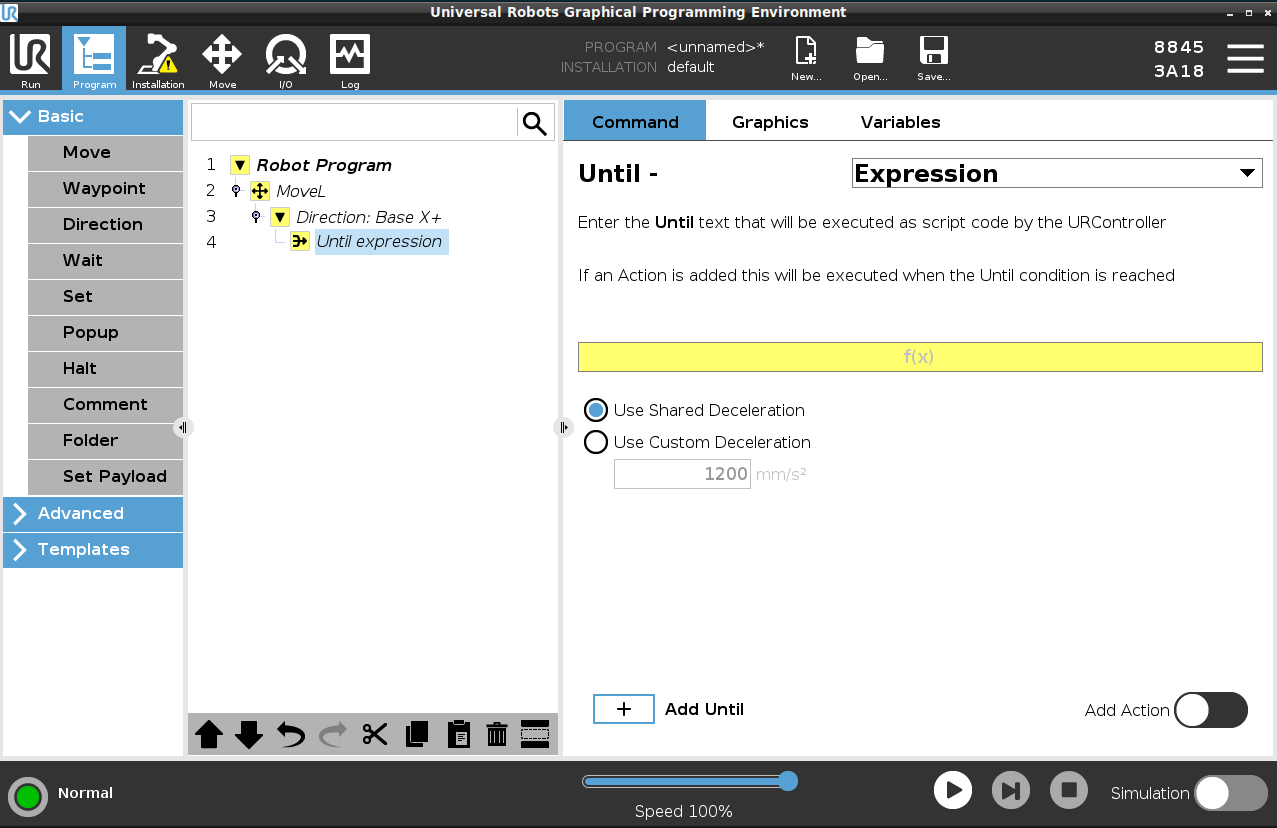
| 表达式 |
此节点使用自定义程序表达式来停止机器人的运动。 您还可以使用表达式来指定停止条件。 也可以使用变量和脚本函数指定停止条件。 |
| 向机器人程序中添加“直到”表达式 |
|
| 距离 |
当机器人移动一定距离时,此节点停止方向移动。 速度逐渐降低,因此机器人会准确地停在特定距离处。 还可以使用特定距离作为停止条件。
|
|
示例 |
您可以使用距离函数在工具完全停止之前将其移动特定距离,例如将工具从工件移开。
|
| 向机器人程序中添加“直到”距离 |
|

| I/O 输入 |
此节点使用 I/O 输入来停止信号控制的运动。 还可以使用 I/O 输入来指定停机条件。 |
| 向机器人程序中添加“无动作” |
|
| 添加动作 |
此节点允许您在满足特定“直到”条件的情况下添加程序节点。 您还可以添加要在“直到”命令之后立即执行的附加动作。 |
| 示例 |
“直到工具接触”可以啮合抓手工具的抓取动作。 如果未定义动作,则程序执行将继续至程序树中的下一个程序节点。
|
| 在“直到”命令后添加一个“无动作” |
|