方向
| 描述 |
机器人沿着方向程序节点指定的路径移动,直到该移动因添加 Until 条件而停止。
|
| 方向 |
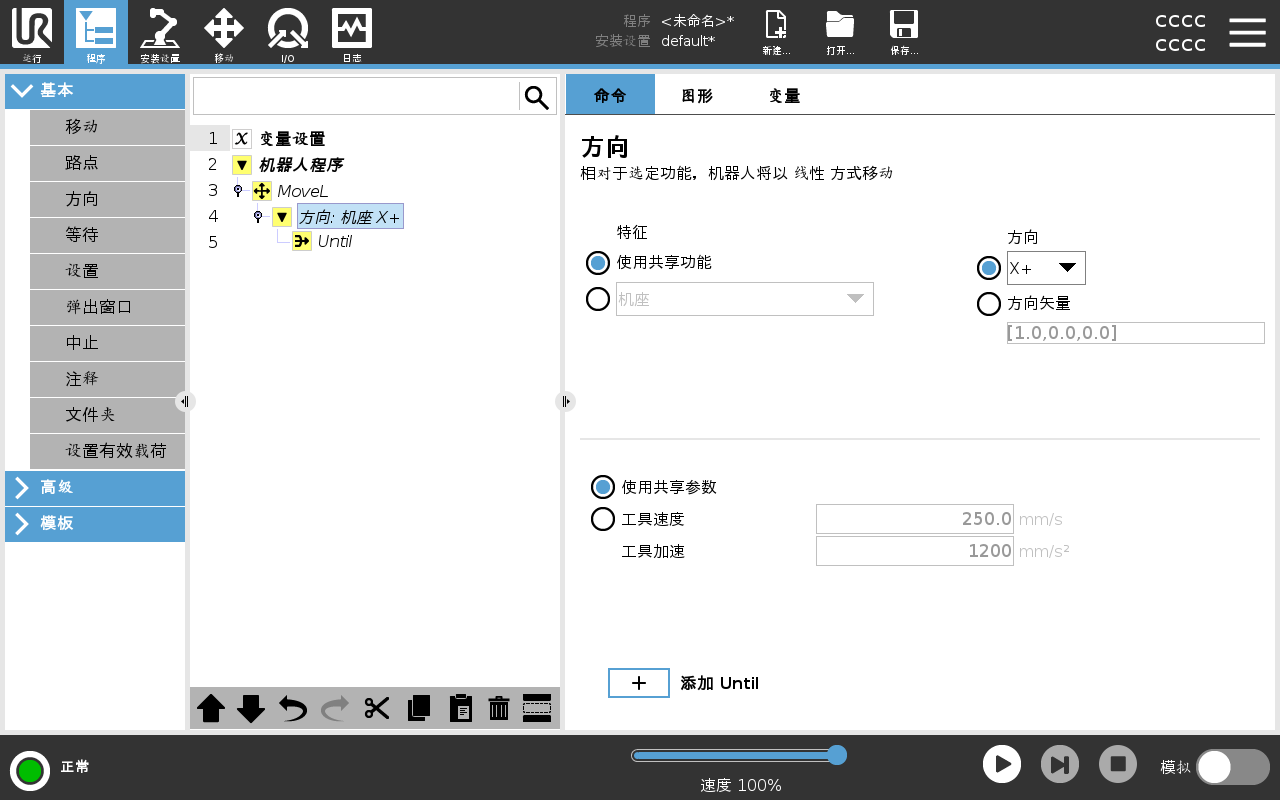
您可以使用“方向”命令让机器人沿特定方向移动。 |
| 示例 |
方向矢量 [100,0,0] 和 [1,0,0] 对机器人的作用相同;使用速度滑块以所需速度沿 x 轴移动。 方向矢量中的数字值仅相对于彼此。 |
| 向机器人程序中添加方向移动 |
|
|
选择特征和方向 |
共享特征或基座/工具之间的区别
方向与输入方向矢量的区别
“方向矢量”定义了一个解析为单位矢量的自定义代码表达式。
|
| 方向移动 |
可以通过多种方式停止方向移动。 |
|
|
在“方向”字段中,点按添加 Until 按钮,以定义停止条件并将其添加到程序树。 |
| 方向矢量 |
“方向矢量”设置可以定义线性运动的矢量方向。 使用工具速度和工具加速度执行以下操作:
|