手腕夹紧扭矩限值
| 描述 |
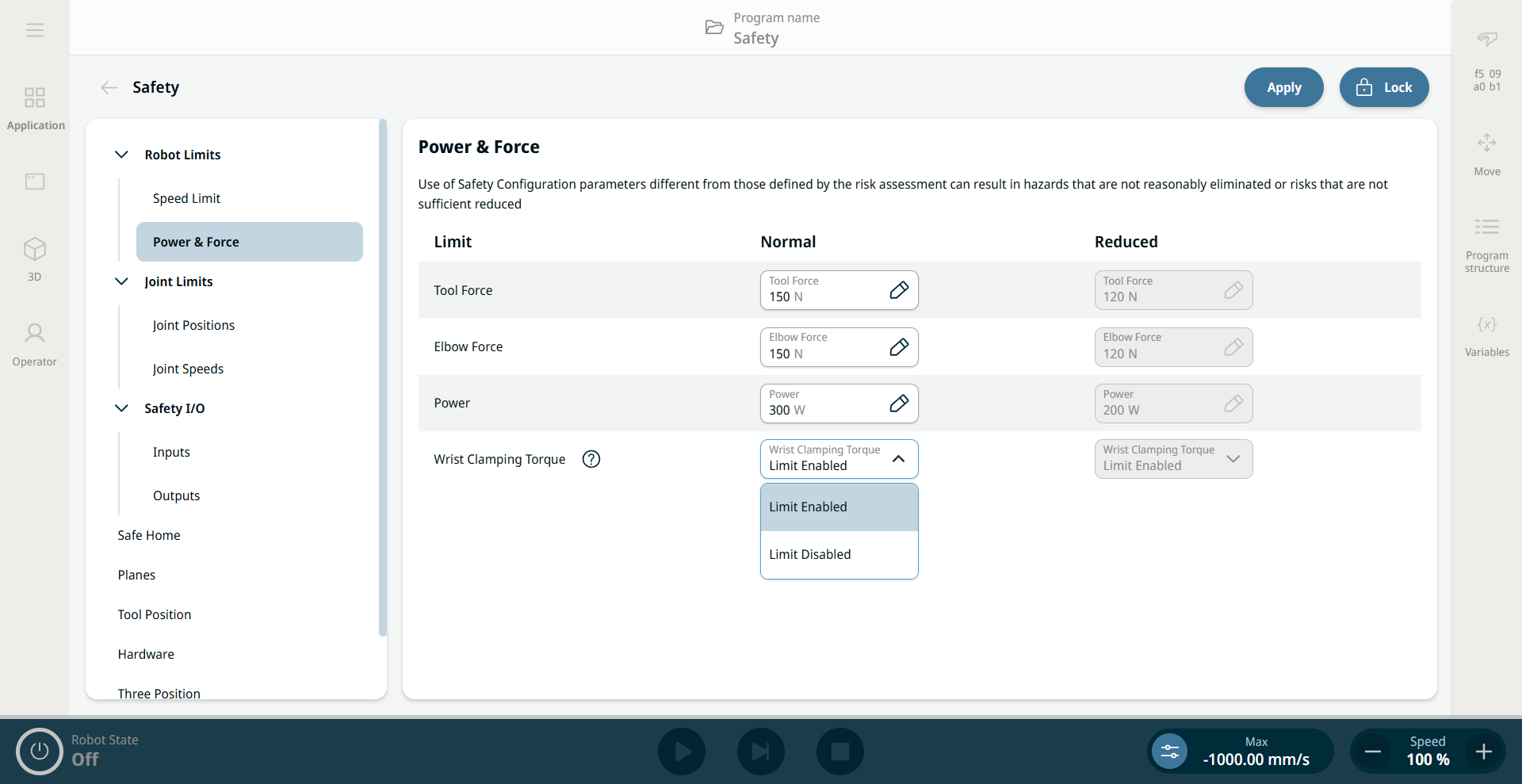
借助手腕夹紧扭矩限值设置,可以启用或禁用对机器人腕关节最大夹紧扭矩的限制。 此限制默认处于启用状态。 此安全功能会限制手腕在进行推动操作时可以施加的扭矩大小。
|
|
手腕夹紧扭矩限值详细信息 |
启用时,机器人会限制腕关节的扭矩,以防止在手腕、有效载荷和机器人下臂之间发生夹伤。 此设置启用后,还会为基座、肩部和肘部关节的施加扭矩窗口定义一个非安全级上限值。 在力控制应用中,可达到的接触力可能显著低于在工具力限值和肘部力限值安全功能中指定的力。
禁用时,机器人可以向腕关节施加更大的推力,例如在力受控应用中。 此功能禁用时,必须通过其他方式降低在机器人的手腕、有效载荷和下臂之间发生夹伤的风险。 此安全功能在所有机器人上默认启用。 在 PolyScope X 版本 10.12 及更高版本中,可以禁用此安全功能。
|
|
启用和禁用手腕夹紧扭矩限值 |
|