安全平面
| 描述 |
定义安全平面仅限制定义的工具球体和弯头,而不是机械臂的总体限制。 定义安全平面并不能保证机械臂的其他部分会遵守此类限制。 |
| 配置安全平面 |
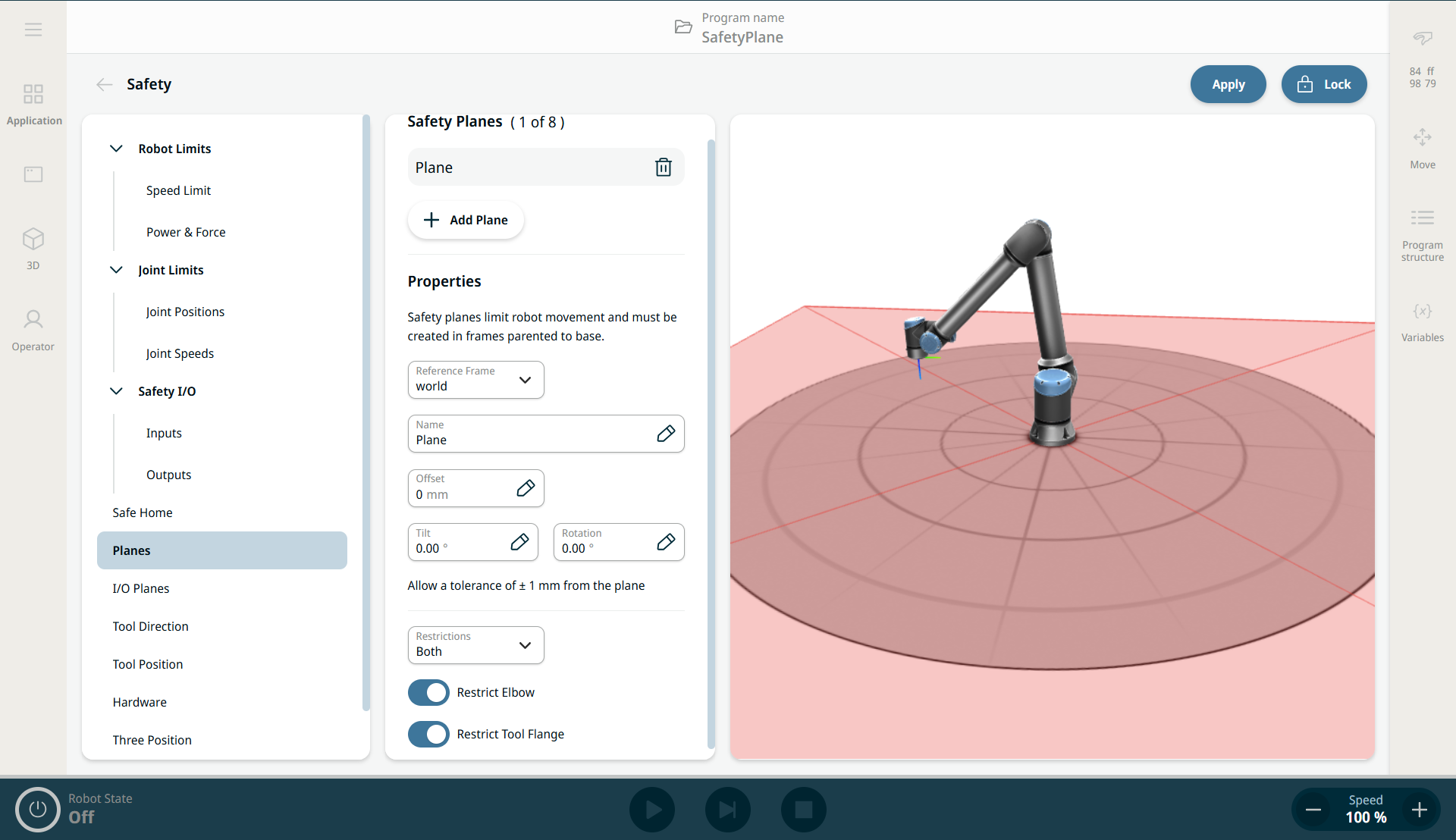
可以使用以下属性配置安全平面:
可以使用以下限制配置每个平面:
|
| 肘部关节限制 |
此功能默认处于启用状态。 您可以使用“限制肘部”来防止机器人肘部关节通过您定义的任何平面。 禁用限制肘部,以使肘部穿过平面。
|
| 工具法兰限制 |
限制工具法兰可以防止工具法兰和连接的工具穿过安全平面。 当您限制工具法兰时,非限制区域是安全平面内的区域,在该区域内工具法兰可以正常操作。 工具法兰不能越过安全平面外的限制区域。 移除限制后,工具法兰将可以超出安全平面,到达受限区域,而连接的工具仍位于安全平面内。 使用较大的工具偏移时,可以移除工具法兰限制。 这样可以让工具移动更远的距离。 限制工具法兰需要创建平面特征。 平面特征用于稍后在安全设置中设置安全平面。
|