G/Ç Düzlemleri
| Açıklama |
I/O Düzlemleri özelliği, güvenlik düzlemlerinin standart düzlemlere kıyasla daha esnek kullanımını sağlar Güvenlik Uçakları işlevsellik. Terminal girişlerini kullanarak güvenlik düzlemlerini etkinleştirmenizi ve devre dışı bırakmanızı ve/veya güvenlik küreleri bir güvenlik düzlemini geçtiğinde bir çıkış sinyali oluşturmanızı sağlar.
|
|
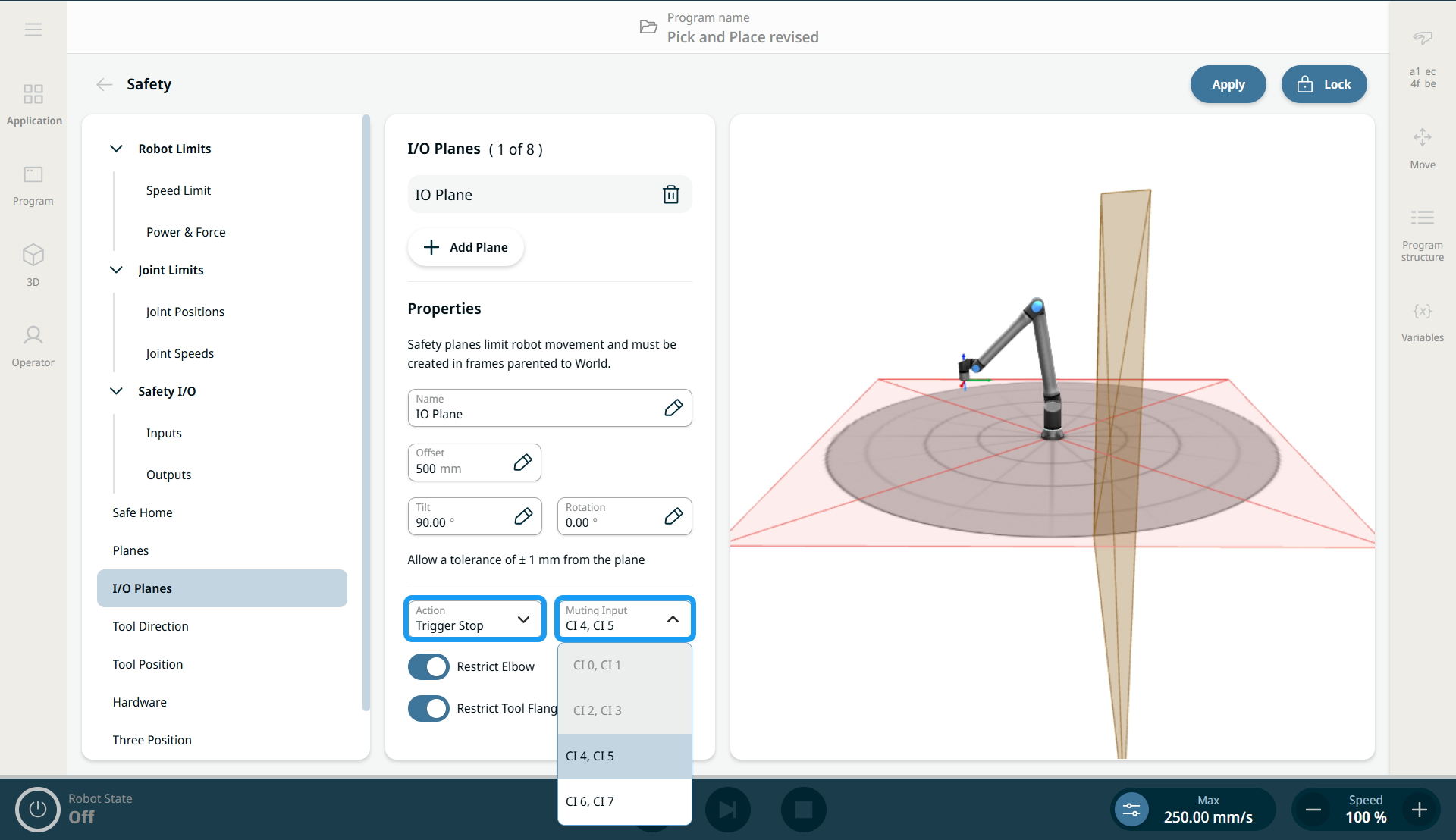
Giriş/Durdurma Düzlemi |
Trigger Stop bir G/Ç düzlemi durdurmasını tetikler. Bir güvenlik girişi kullanılarak susturulabilir. Susturulmadığı sürece, uçağa doğru hareket etmek robotun durmasına ve güvenlik girişi uçağı susturana kadar beklemesine neden olur. Düzlem etkin olmadığında, robotun serbestçe hareket etmesine izin verilir. Düzlem aktif olduğunda ve robot düzlemi geçmediğinde, robot düzlemi geçmeden önce duracaktır. Düzlem etkinleştirilirse, robot düzlemin kenarında hareket ederken, robot düzlemi geçebilir ve en kötü durumda yapılandırılmış mesafe ve durma süresi sınırlarına göre duracaktır. Düzlem etkinleştirildiğinde ve robot düzlemi geçtiğinde, robot yapılandırılmış durma mesafesi ve durma süresi sınırlarına göre duracaktır.
|
|
|
|
|
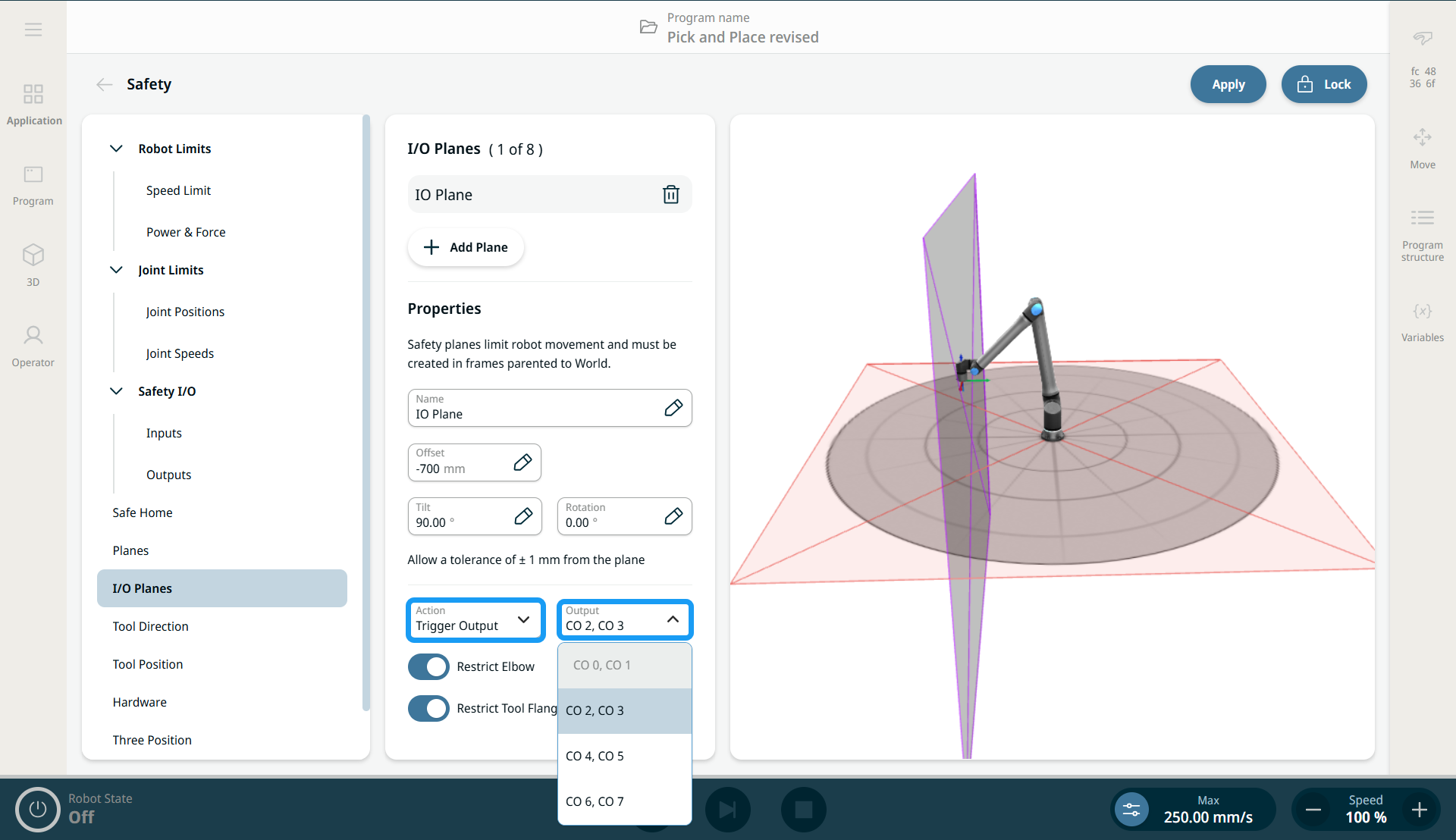
Çıkış Düzlemi |
Tetikleme Çıkışı, bir veya daha fazla güvenlik küresinin düzlemi geçip geçmediğine bağlı olarak bir güvenlik çıkışı oluşturur. Bir veya daha fazla emniyet küresi tetik çıkışı olarak tanımlanan bir düzlemi geçtiğinde, bu düzleme karşılık gelen emniyet çıkışı etkinleştirilir. "Etkinleştirildi", güvenlik çıkışlarının elektriksel olarak "Düşük" olarak ayarlandığı anlamına gelir. Güvenlik kürelerinden herhangi biri tetik çıkışı olarak tanımlanan bir düzlemi geçtiğinde, bu düzleme karşılık gelen güvenlik çıkışı etkinleştirilir.
|