Güvenlik G/Ç
| Açıklama |
G/Ç, girişler ve çıkışlar arasında bölünmüştür ve her bir işlev Kategori 3 PLd özelliği sağlayacak şekilde eşleştirilmiştir.
Programları bir G/Ç veya veri yolu girişinden başlatırken, robot sahip olduğu konumdan harekete başlayabilir, gerekli PolyScope aracılığıyla ilk yol noktasına herhangi bir manuel hareket olmaz.
|
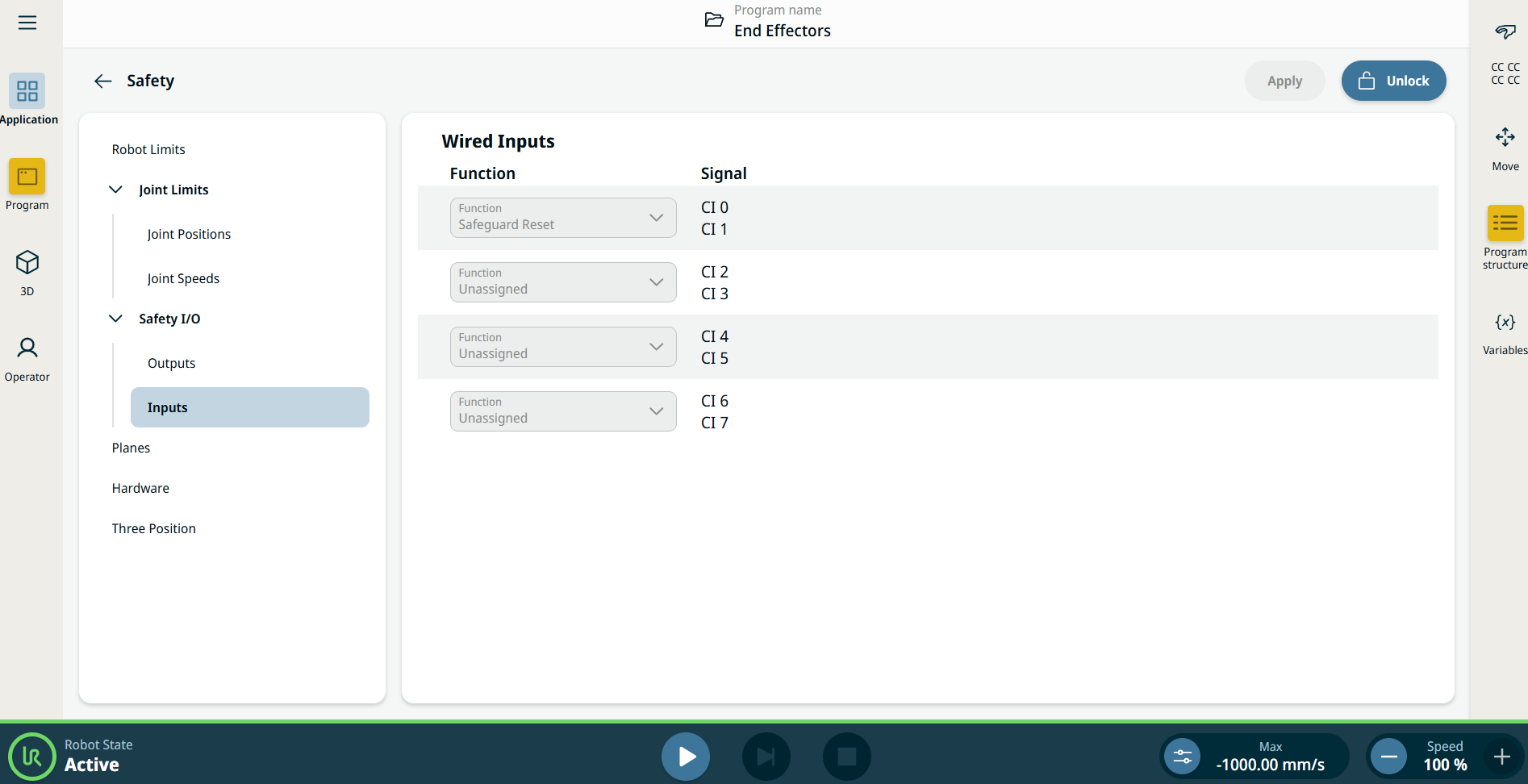
| Kontrol Kutusu Girişleri |
Girişler aşağıdaki tabloda açıklanmaktadır:
Varsayılan Koruma Sıfırlaması devre dışı bırakıldığında, koruma artık bir durdurmayı tetiklemediğinde otomatik bir sıfırlama gerçekleşir. Bu durum, bir kişinin koruma alanından geçmesi hâlinde meydana gelebilir. Bir kişi koruma tarafından algılanmazsa ve kişi tehlikelere maruz kalırsa otomatik sıfırlama standartlar tarafından yasaklanmıştır.
Otomatik Mod Koruma durdurması etkinleştirildiğinde, Manuel Modda bir koruma Durdurması tetiklenmez.
|
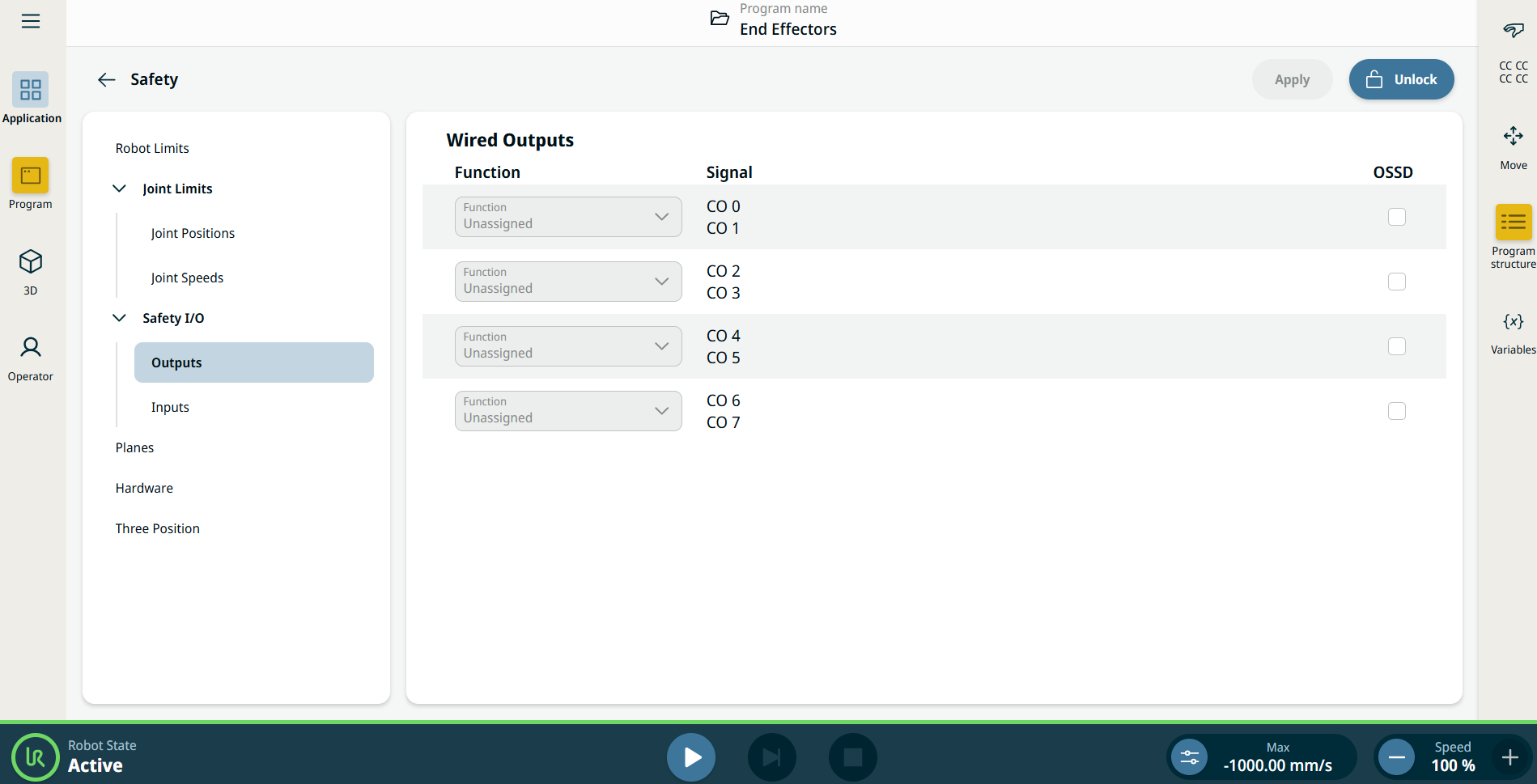
| Kontrol Kutusu Çıkışları |
Güvenlik sistemi ihlali veya hatası durumunda tüm güvenlik çıkışları düşük seviyeye iner. Bu, Sistem Durdurma çıkışının bir E-stop tetiklenmediğinde bile bir durdurma başlattığı anlamına gelir. Aşağıdaki Güvenlik işlevleri çıkış sinyallerini kullanabilirsiniz. Yüksek sinyali tetikleyen durum sona erdiğinde tüm sinyaller tekrar düşük olur:
Acil Durdurma durumunu Sistem Durdurması çıkışı aracılığıyla robottan alan tüm harici makineler ISO 13850 ile uyumlu olmalıdır. Bu özellikle Robot Acil Durum Durdurma girişinin harici bir Acil Durum Durdurma aygıtına bağlı olduğu kurulumlarda gereklidir. Bu gibi durumlarda, harici Acil Durdurma cihazı serbest bırakıldığında Sistem Durdurması çıkışı yüksek olur. Bu, robotun operatörünün herhangi bir manuel eylem yapması gerekmeden harici makinedeki acil durum durdurma durumunun sıfırlanacağına işaret eder. Dolayısıyla, güvenlik standartlarına uyması için harici makinenin devam etmek için manuel eylem gerektirmesi gerekir.
|