I/O-plan
| Beskrivning |
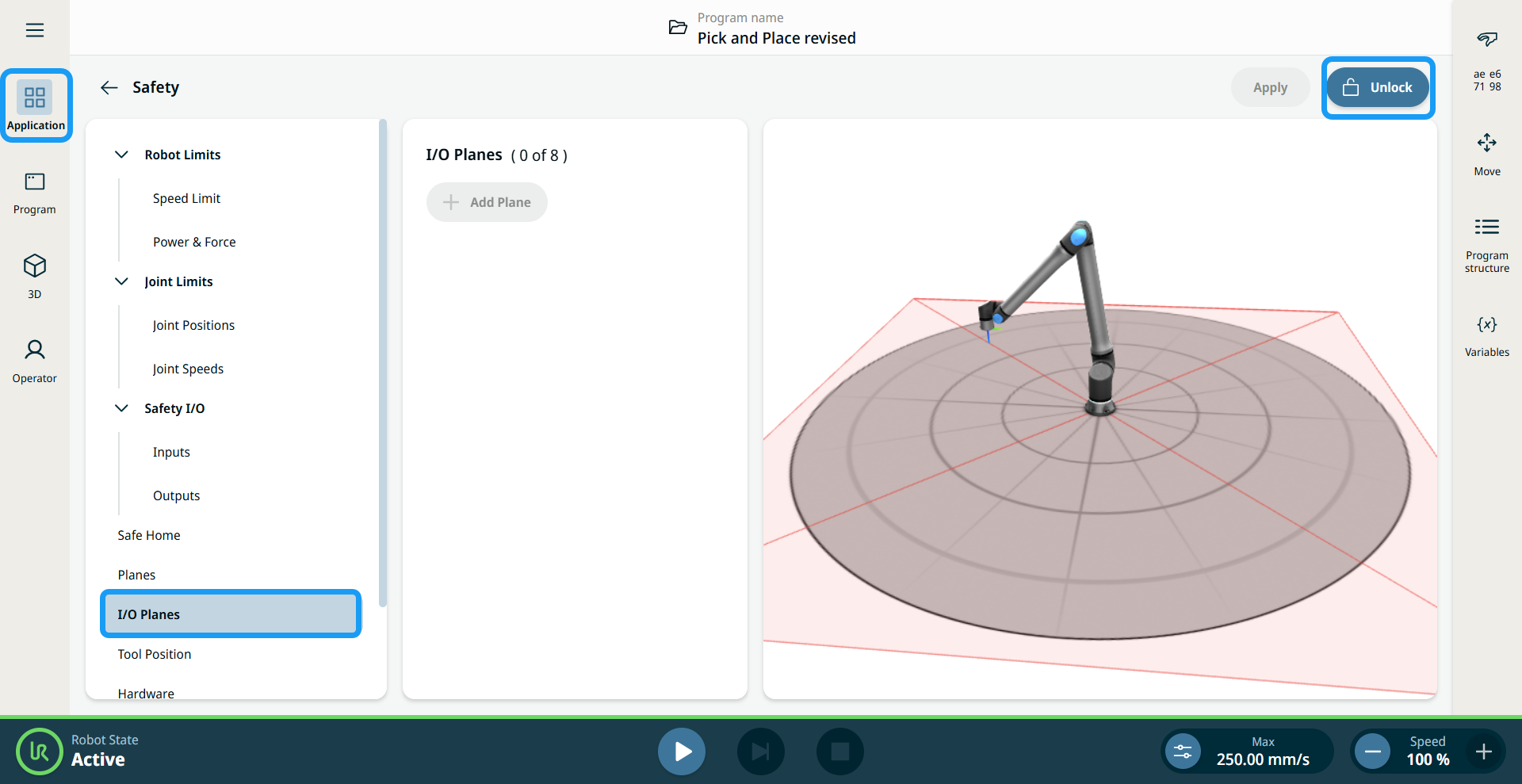
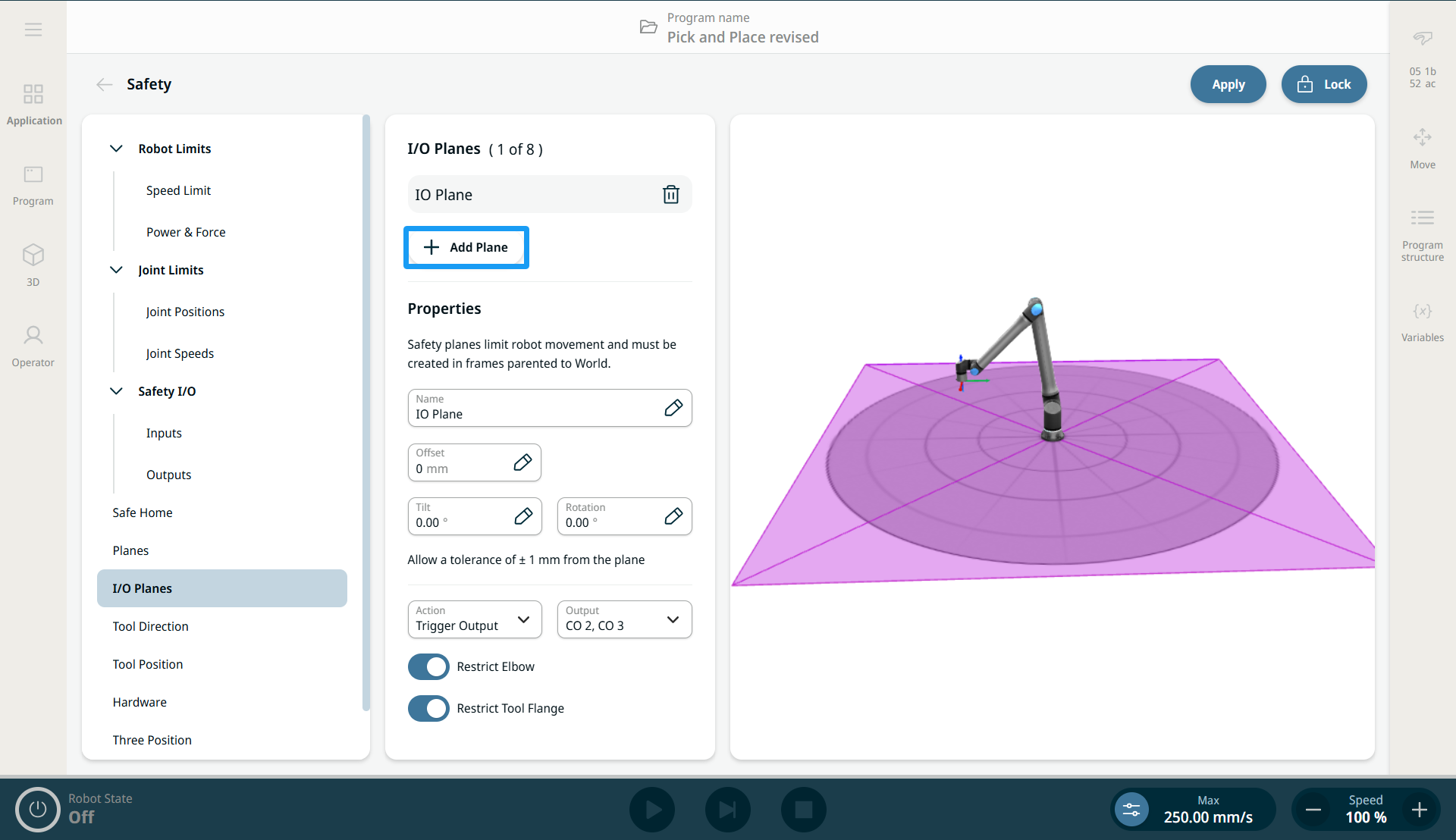
Funktionen I/O Planes ger en mer flexibel användning av säkerhetsplan jämfört med standardfunktionen Säkerhetsplaner funktionalitet. Du kan aktivera och avaktivera säkerhetsplan med hjälp av terminalingångar och/eller generera en utsignal när säkerhetsfärerna korsar ett säkerhetsplan.
|
|
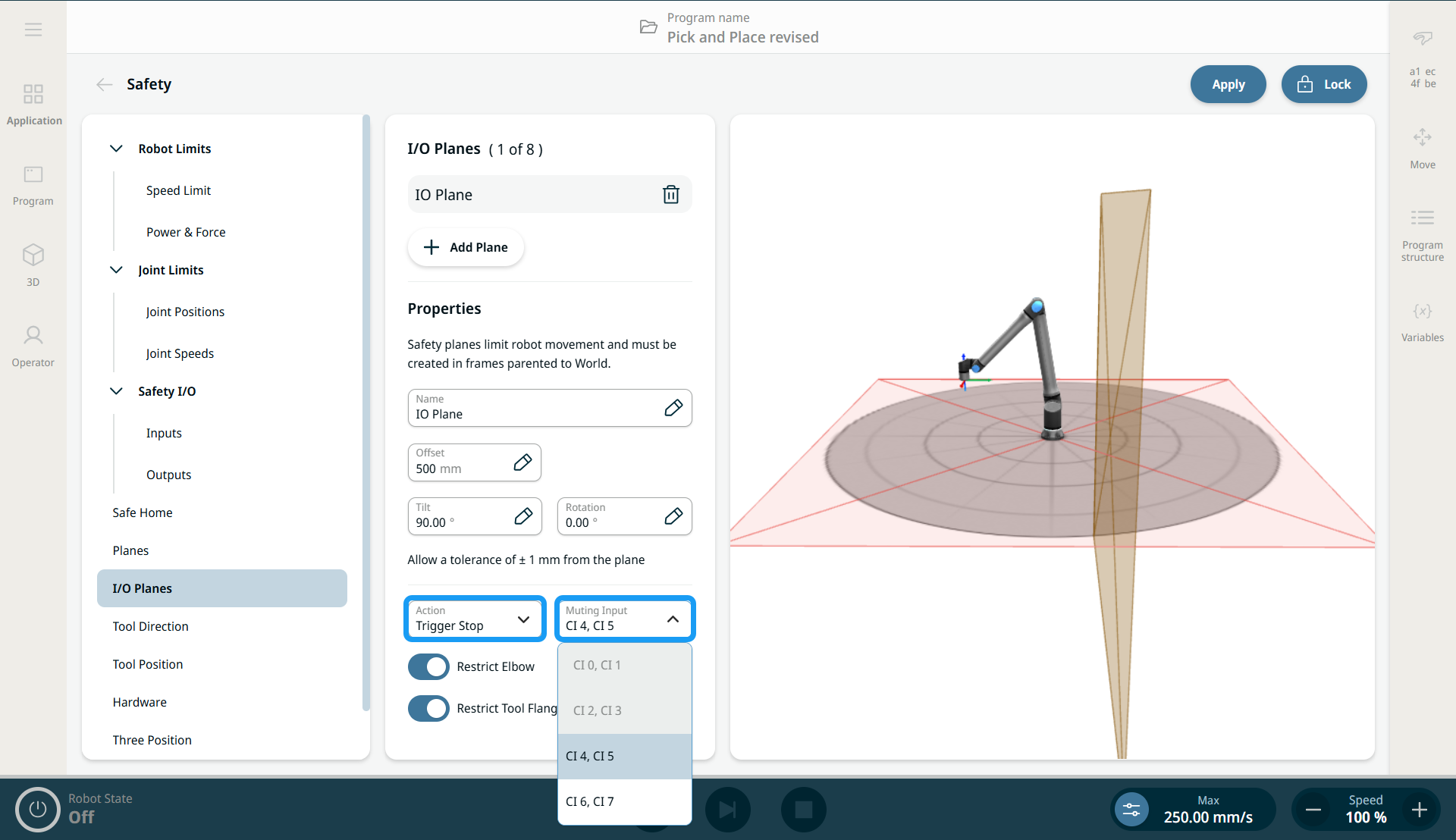
Ingång/Stopp Plan |
Trigger Stop utlöser ett stopp i I/O-planet. Den kan stängas av med hjälp av en säkerhetsingång. Såvida den inte är avstängd, leder en rörelse mot planet till att roboten stannar och väntar tills säkerhetsinmatningen stänger av planet. När planet är inaktivt kan roboten röra sig fritt. När planet är aktivt och roboten inte har korsat planet kommer roboten att stanna innan den korsar planet. Om planet aktiveras medan roboten rör sig på kanten av planet kan det hända att roboten korsar planet och i värsta fall stannar i enlighet med de konfigurerade avstånds- och stopptidsgränserna. När planet är aktiverat och roboten har korsat planet stannar roboten i enlighet med de konfigurerade gränserna för stoppsträcka och stopptid.
|
|
|
|
|
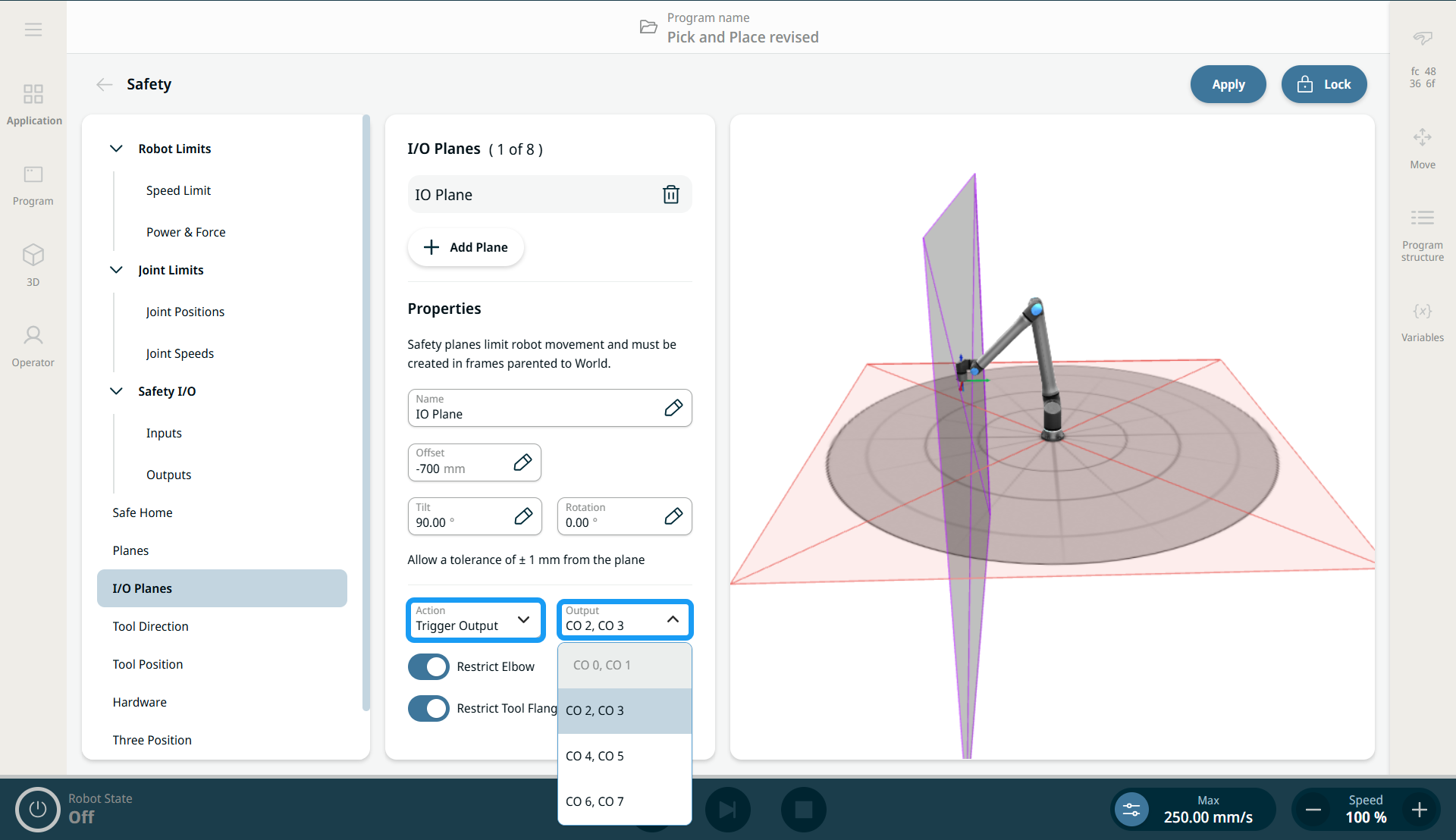
Utgångsplan |
Trigger Output genererar en säkerhetsutgång baserat på om en eller flera av säkerhetssfärerna har korsat planet. När en eller flera av säkerhetsfärerna har passerat ett plan som definieras som triggerutgång, aktiveras den säkerhetsutgång som motsvarar detta plan. "Aktiverad" innebär att säkerhetsutgångarna är elektriskt inställda på "Låg". När någon av säkerhetsfärerna har passerat ett plan som definierats som triggerutgång, aktiveras den säkerhetsutgång som motsvarar detta plan.
|