Säkerhets-I/O
| Beskrivning |
I/O är uppdelade i in- och utgångar, och sätts ihop parvis så att varje funktion har en kategori 3 PLd-kapacitet.
När program startas från en I/O- eller fältbussingång kan roboten börja förflytta sig från den position den har, och det krävs ingen manuell förflyttning till den första vägpunkten via PolyScope.
|
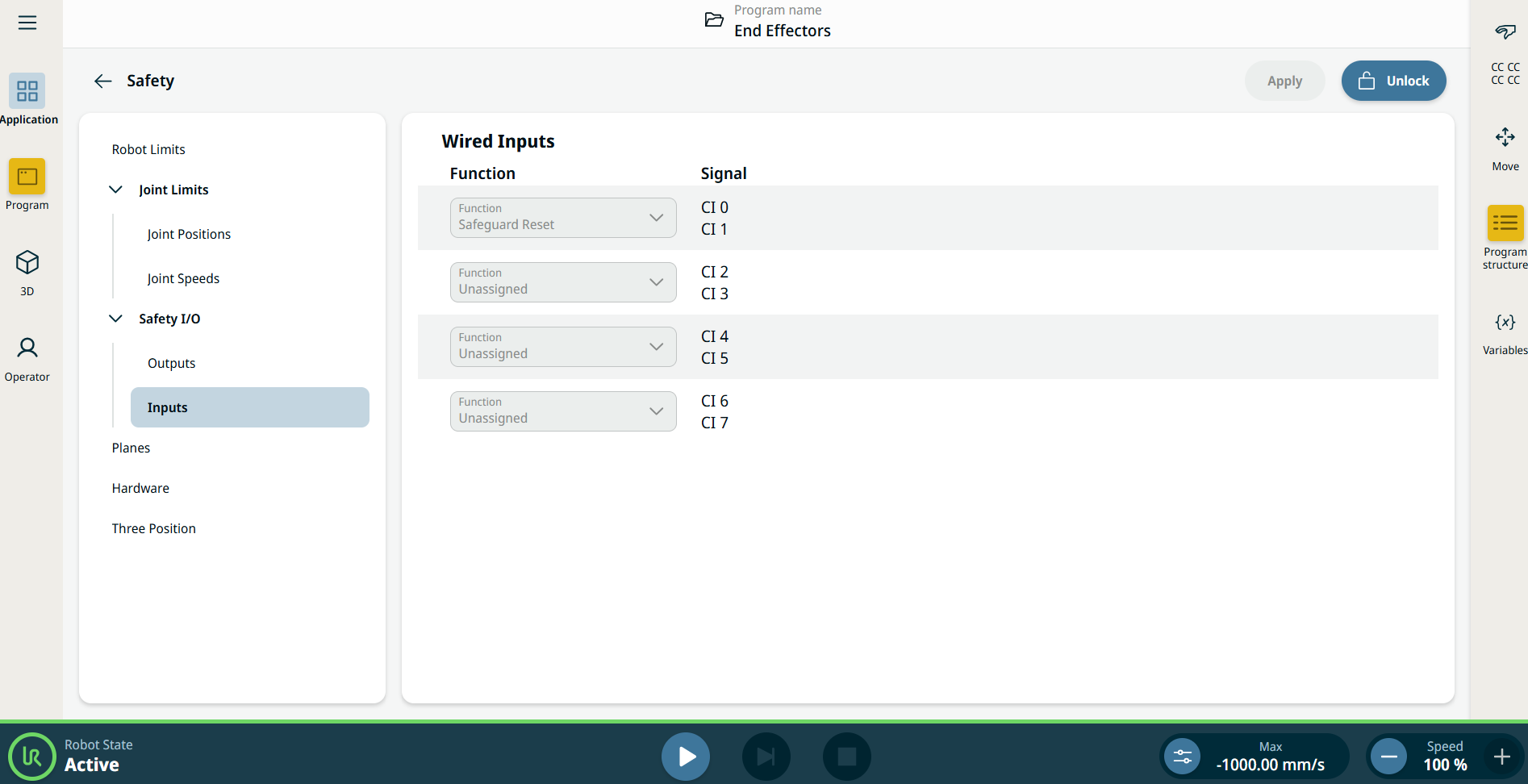
| Manöverskåp Ingångar |
Ingångarna beskrivs i tabellen nedan:
När standardåterställningen av skyddsåtgärder är avaktiverad sker en automatisk återställning när skyddsåtgärden inte längre utlöser ett stopp. Detta kan inträffa om en person passerar genom skyddets område. Om en person inte upptäcks av skyddet och personen utsätts för faror är automatisk återställning förbjuden enligt standarderna.
När säkerhetsstopp i automatiskt läge är aktiverat, utlöses inte ett säkerhetsstopp i manuellt läge.
|
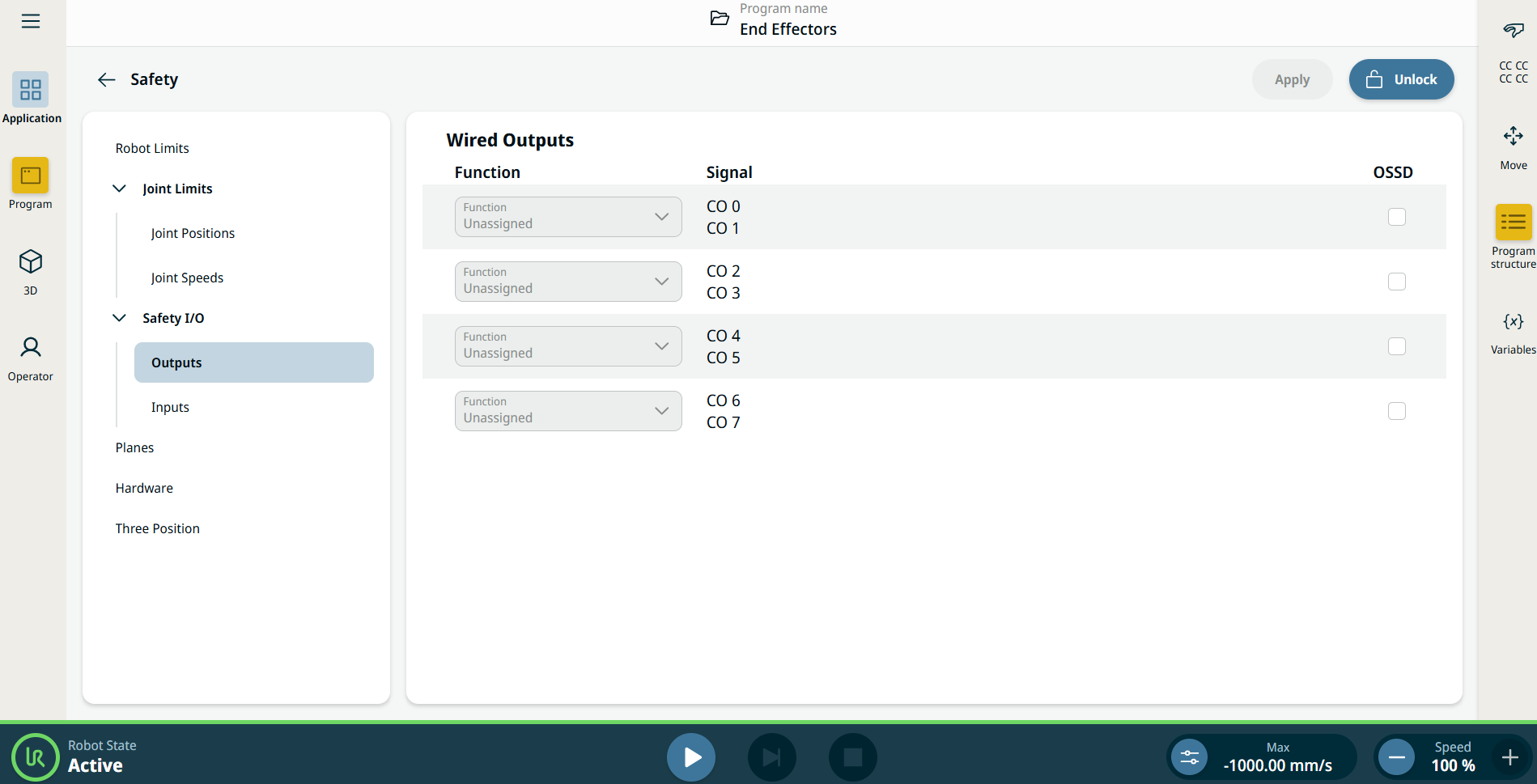
| ManöverskåpUtgångar |
Alla säkerhetsutgångar blir låga i händelse av en överträdelse eller ett fel i säkerhetssystemet. Detta innebär att systemstopputgången initierar ett stopp även om ett nödstopp inte utlöses. Du kan använda följande säkerhetsfunktioners utsignaler. Alla signaler återgår till låg när det tillstånd som utlöste den höga signalen inte längre gäller.
Extern maskinutrustning som läser in tillståndet Nödstopp från roboten genom utgången Systemstopp måste uppfylla ISO 13850. Detta är särskilt viktigt i konfigurationer där ingången Robot-nödstopp är ansluten till en extern nödstoppsenhet. I dessa fall kommer utgången Systemstopp att växla till hög när den externa nödstoppsenheten frikopplas. Detta innebär att nödstoppstillståndet hos den externa maskinutrustningen återställs utan att någon manuell åtgärd krävs från robotoperatören. För att uppfylla säkerhetsstandarderna måste den externa maskinutrustningen kunna återställas manuellt för att manuell drift ska kunna fortsätta.
|