Joint Move
| Beskrivning |
The Joint Move is a move command node that supports Motion Profiles. The command creates a movement from point A to point B that is optimal for the robot. Rörelsen kanske inte är en direkt linje mellan A och B, men den är optimal för ledernas start- och slutposition. Joint Move makes movements that are calculated in the robot arm joint space. Lederna styrs för att slutföra sina rörelser samtidigt. Denna typ av rörelse ger verktyget en böjd bana att följa.
|
|
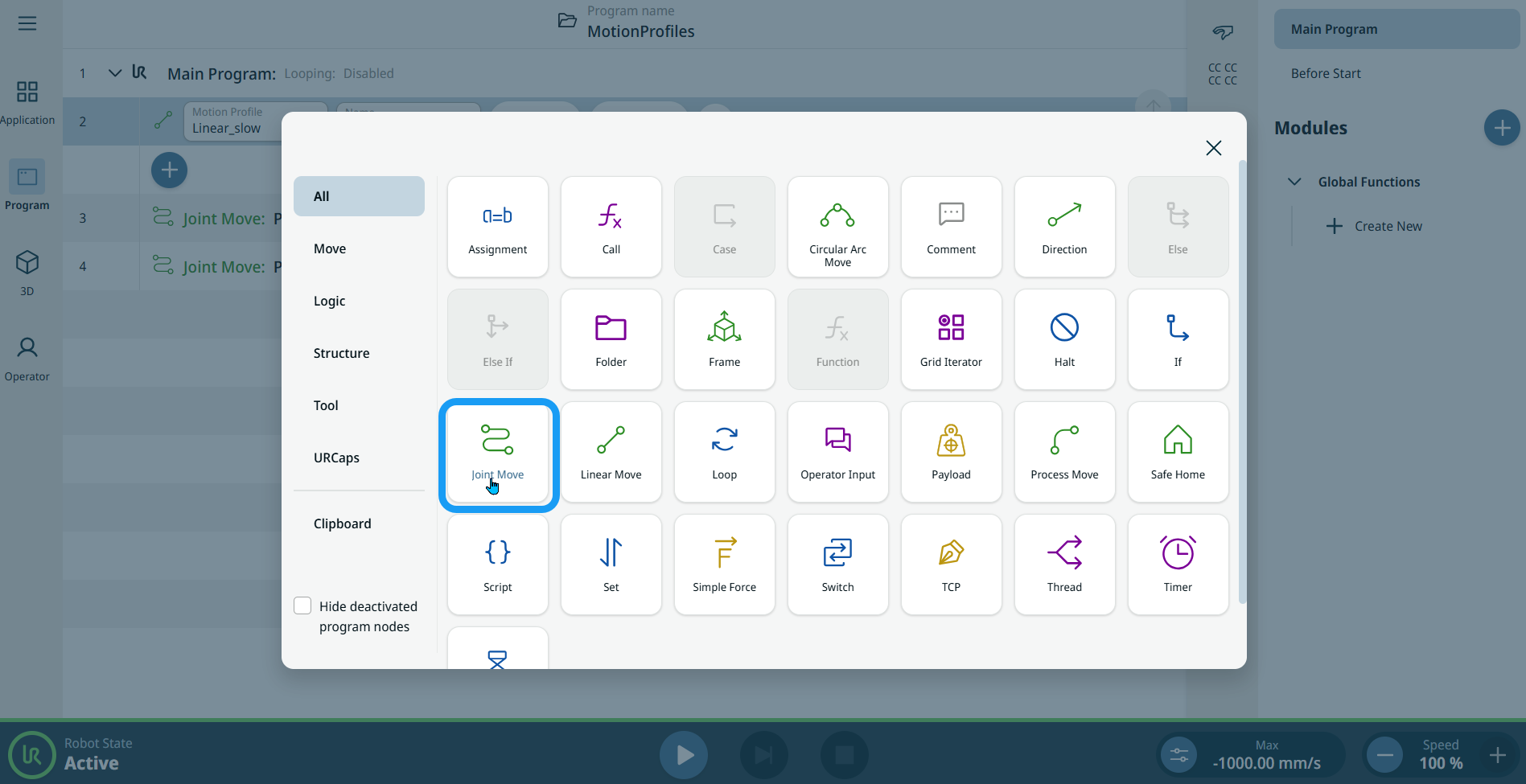
To access Joint Move command |
|
|
|
|
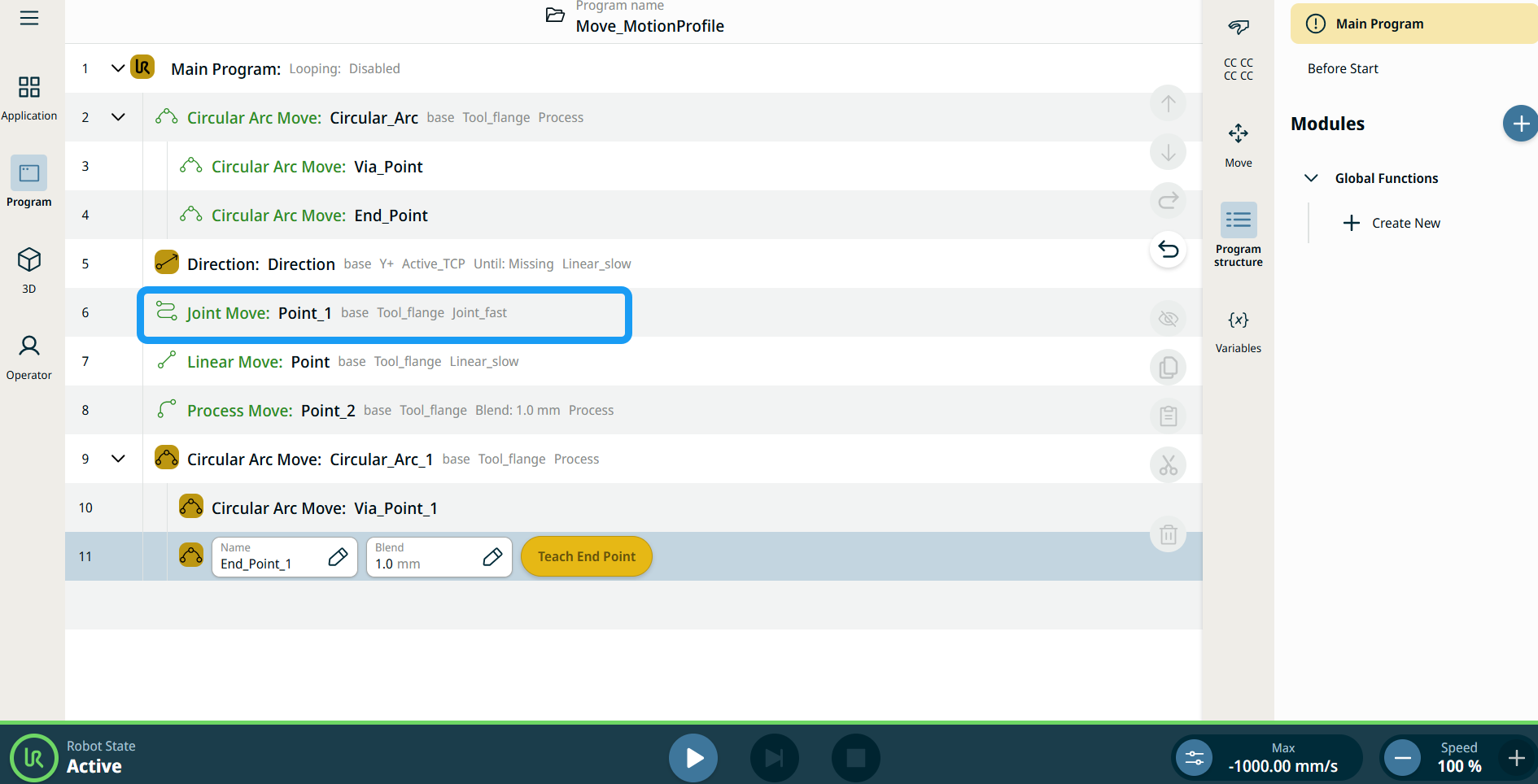
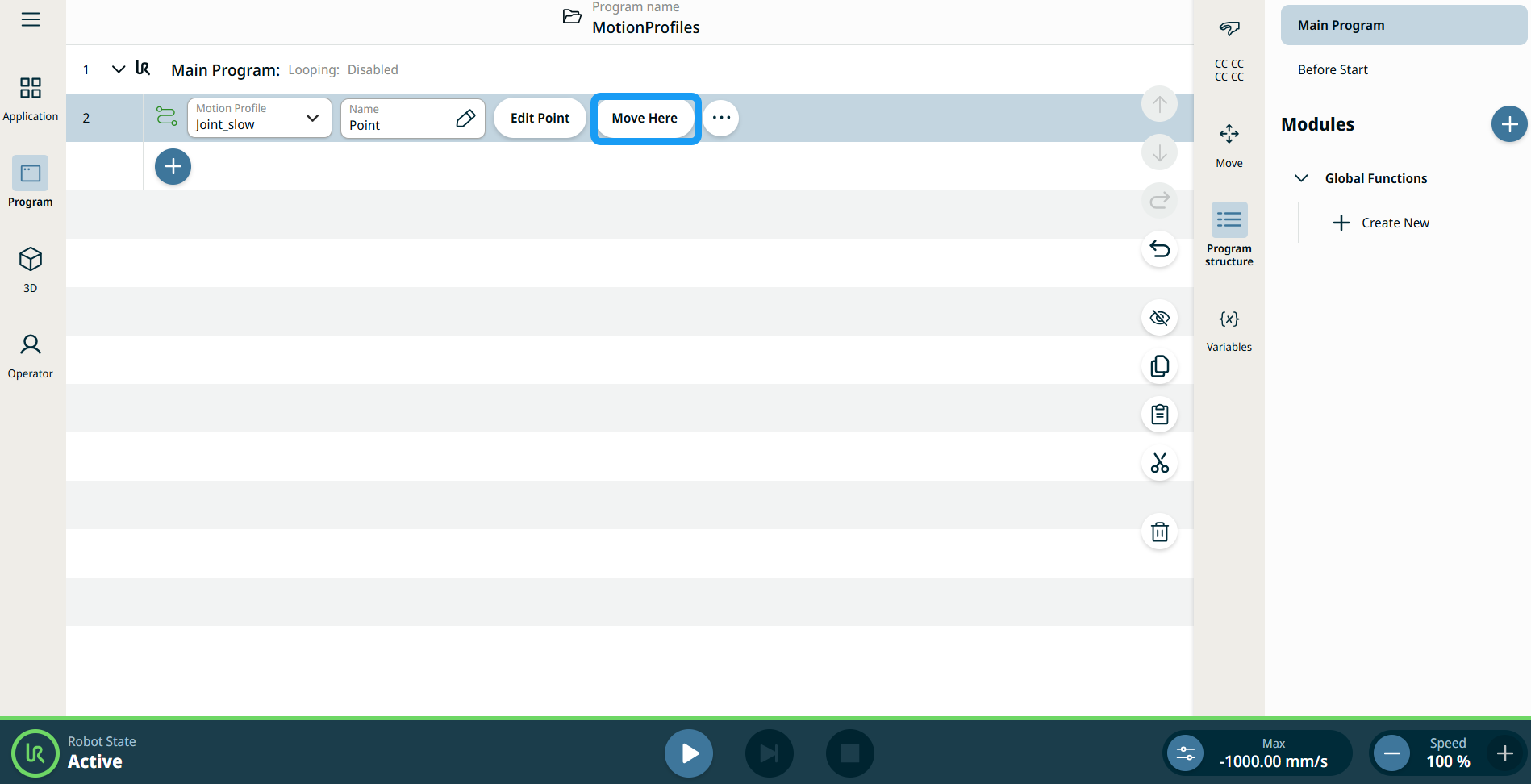
| Rörelseprofiletiketter på flyttnoder |
Alla rörelserelaterade kommandonoder i programträdet visar den rörelseprofil som är associerad med varje nod. Funktionen gör det möjligt för användare att se den valda rörelseprofilen på en Flytta-nod. Denna funktion är implementerad på följande kommandonoder: Flytta noder med anpassad rörelseprofil visar värdena för hastighet och acceleration istället för rörelseprofil. |
|
|
|
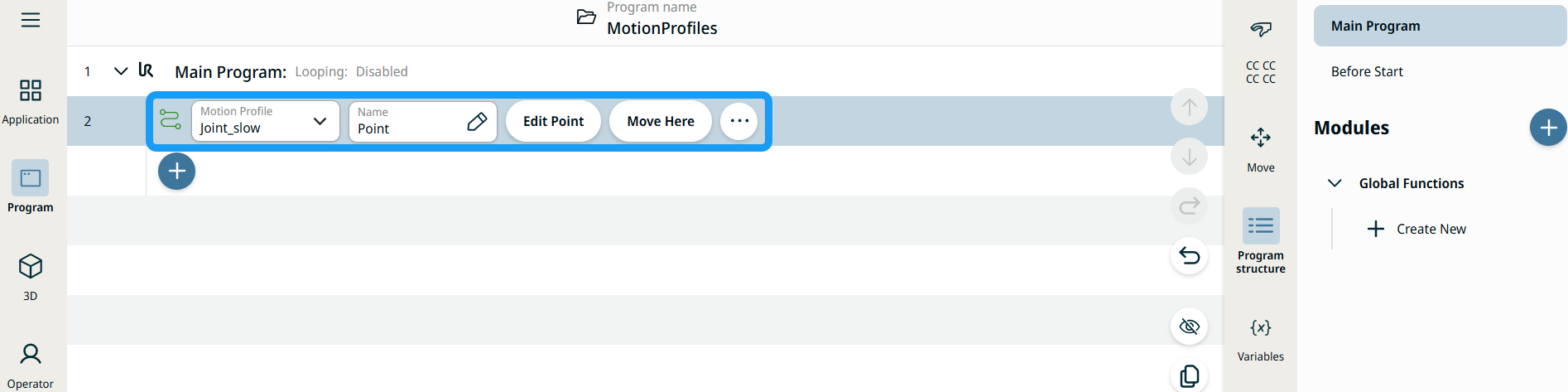
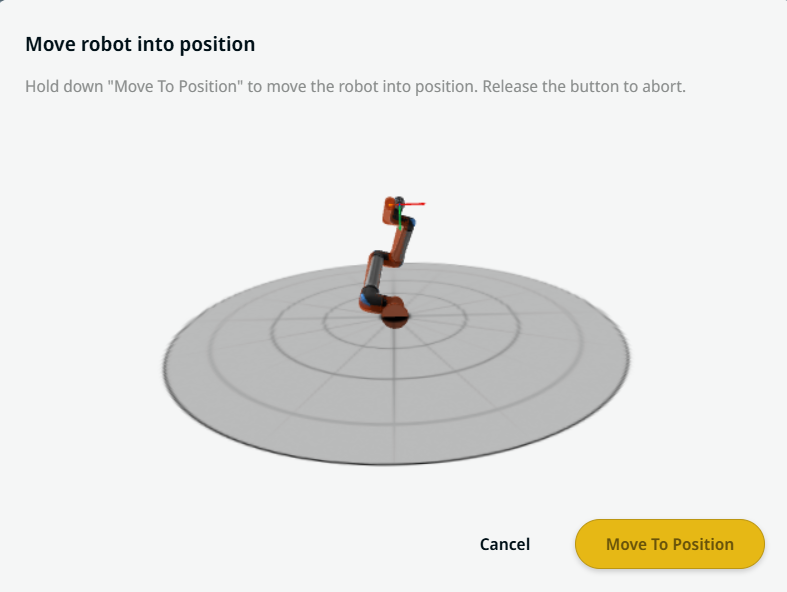
| Använda knappen Flytta hit |
Knappen Flytta hit visas i kommandona Linear Move och Joint Move. Denna funktion gör det möjligt att flytta till en vägpunkts position direkt från programträdet. Om du trycker på knappen Flytta hit öppnas dialogrutan Flytta roboten till position. Knappen är synlig när vägpunkten har programmerats in och är endast aktiverad när robotens status är i läget Normal eller Reducerad.
|
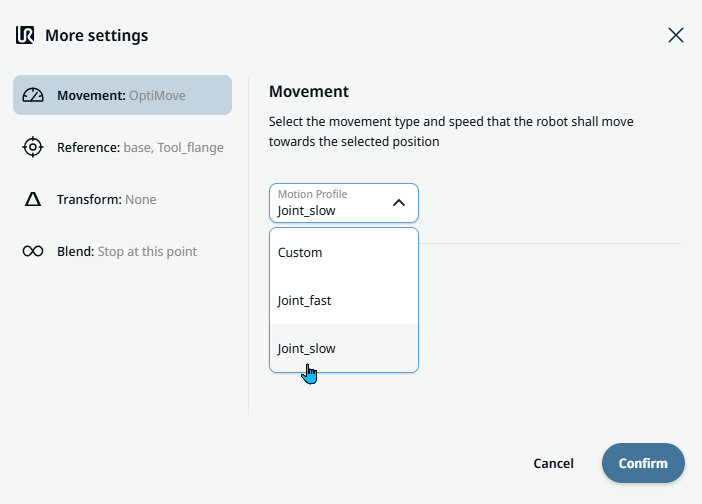
| Movement setting |
|
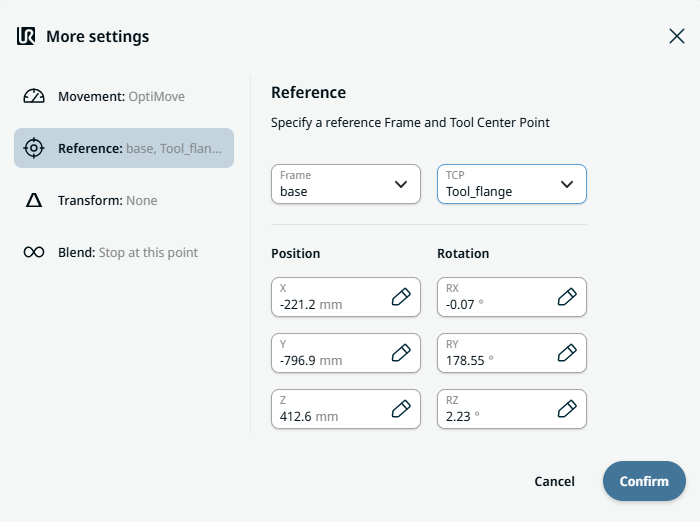
| Reference setting |
|
| Transform setting |
|
|
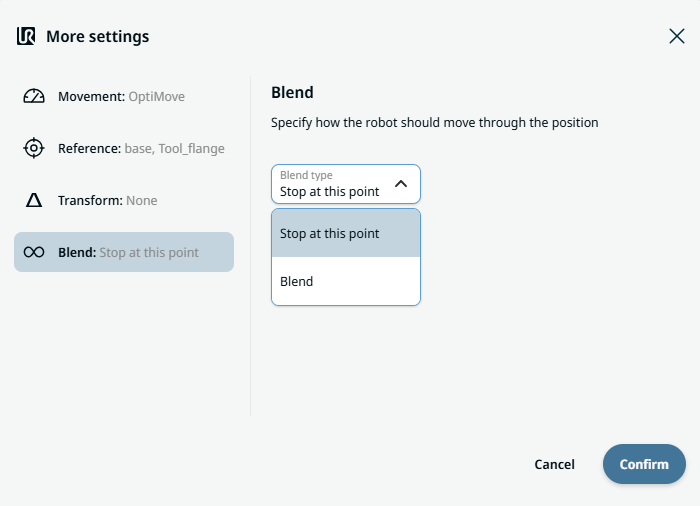
Blend setting |
|