Varen dom
| Opis |
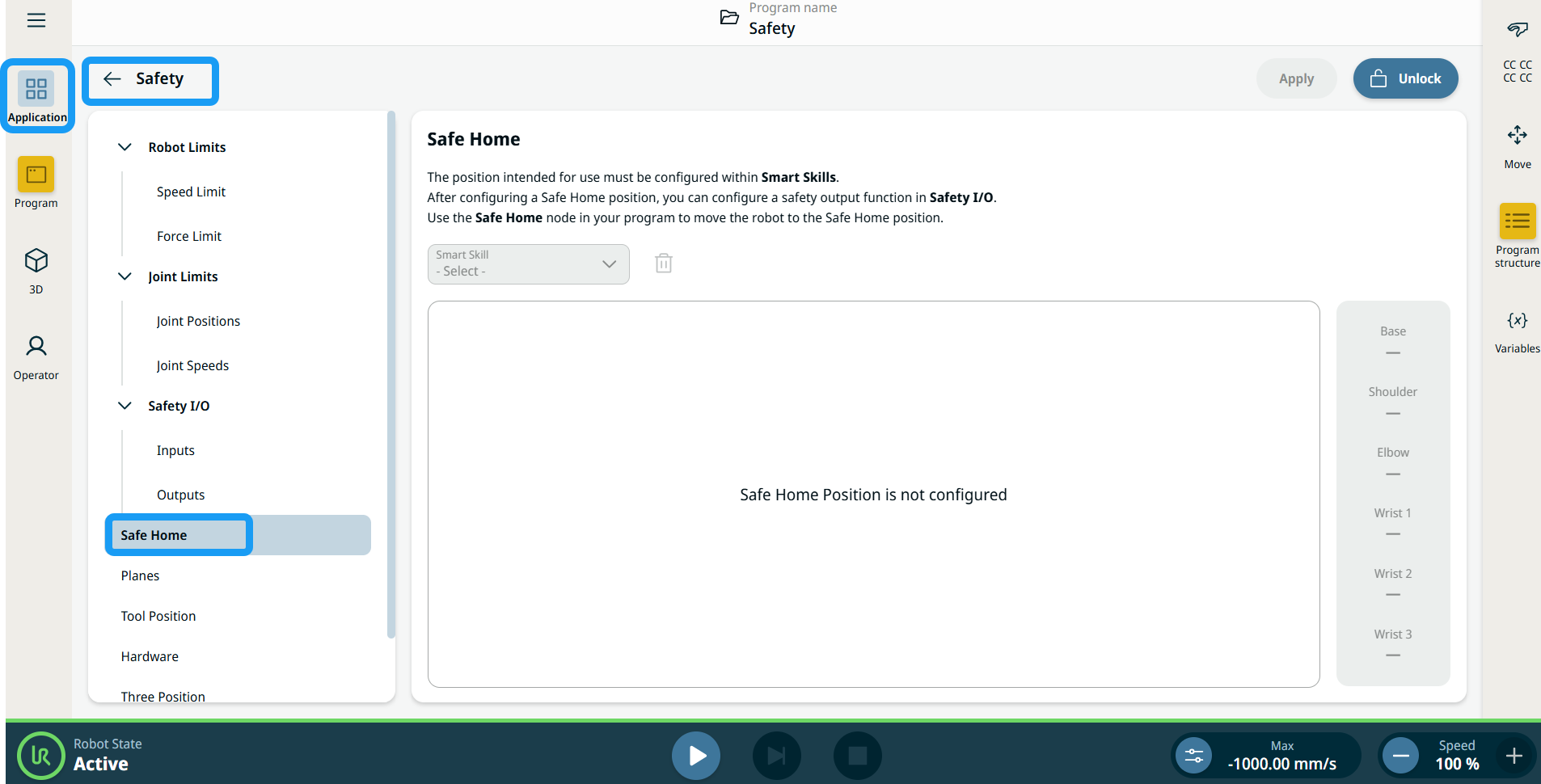
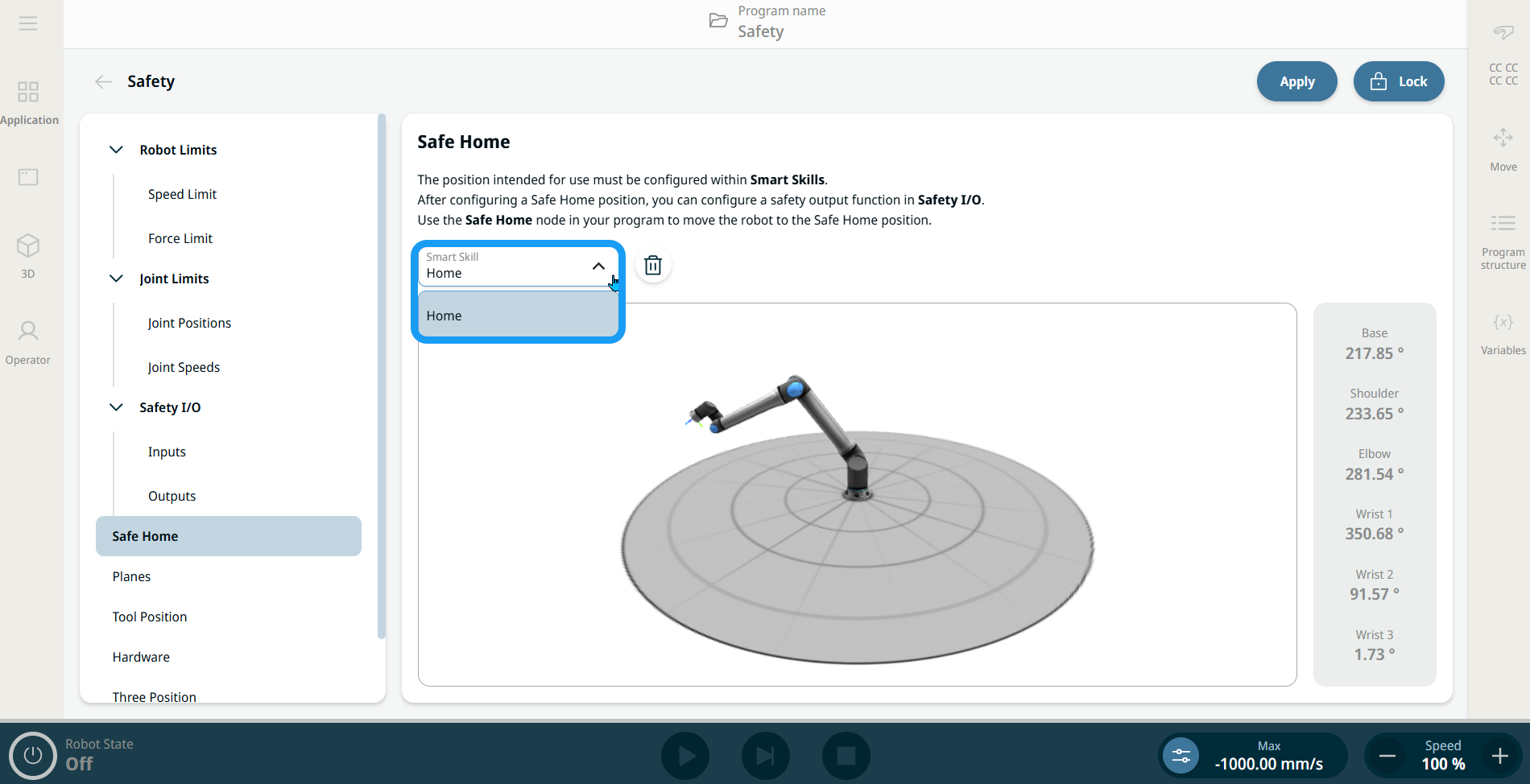
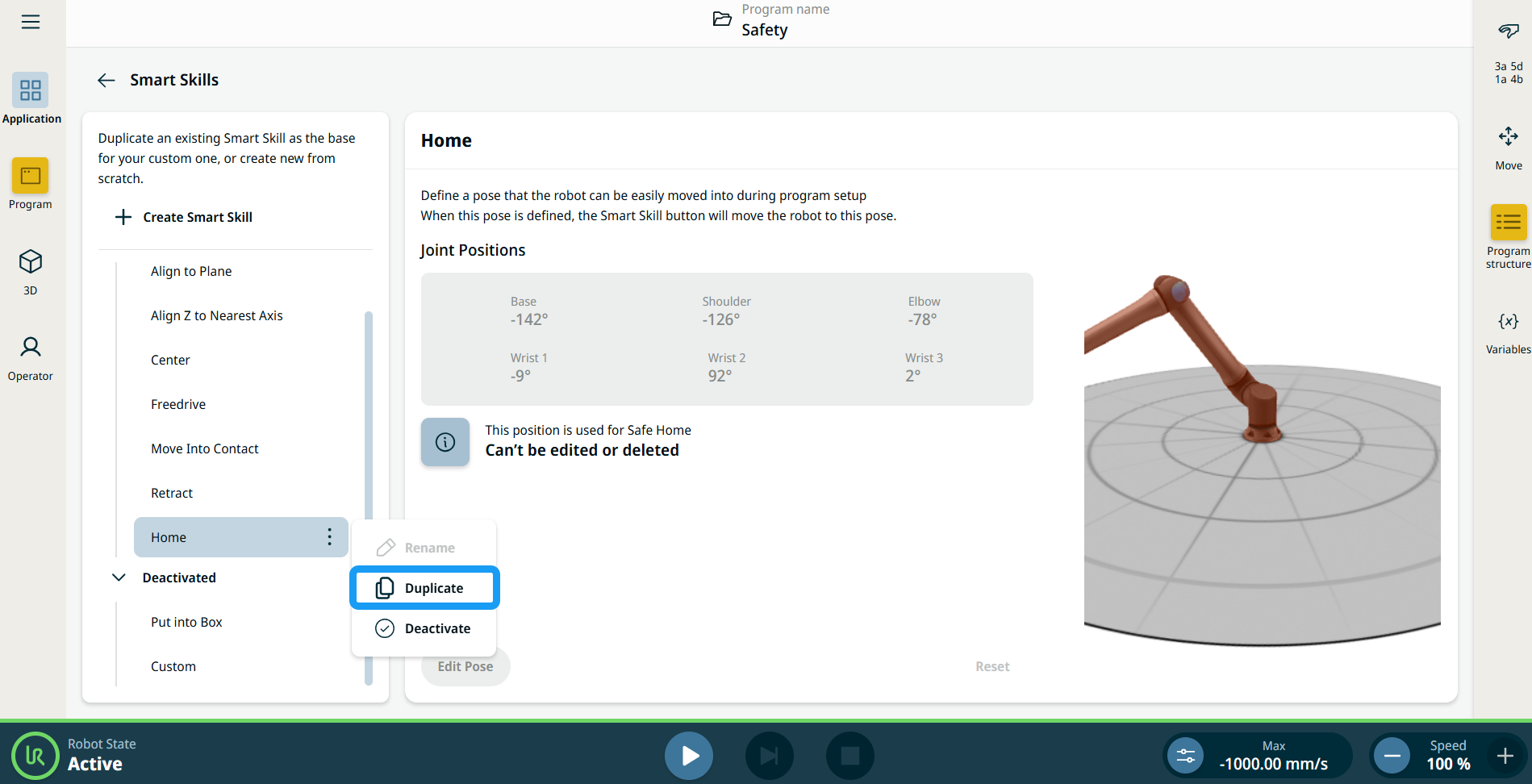
Osnovni položaj je funkcija PolyScope X, ki uporabnikom omogoča, da določijo varnostni izhod, ki se aktivira, ko robot doseže nastavljeni osnovni položaj za varnost. Uporabnik izbere Domov v spustnem meniju razpoložljivih položajev pametnega upravljanja, ki se lahko dodelijo kot referenca za osnovni položaj za varnost.
|
|
Dostop do osnovnega položaja |
|
|
|
|
|
|
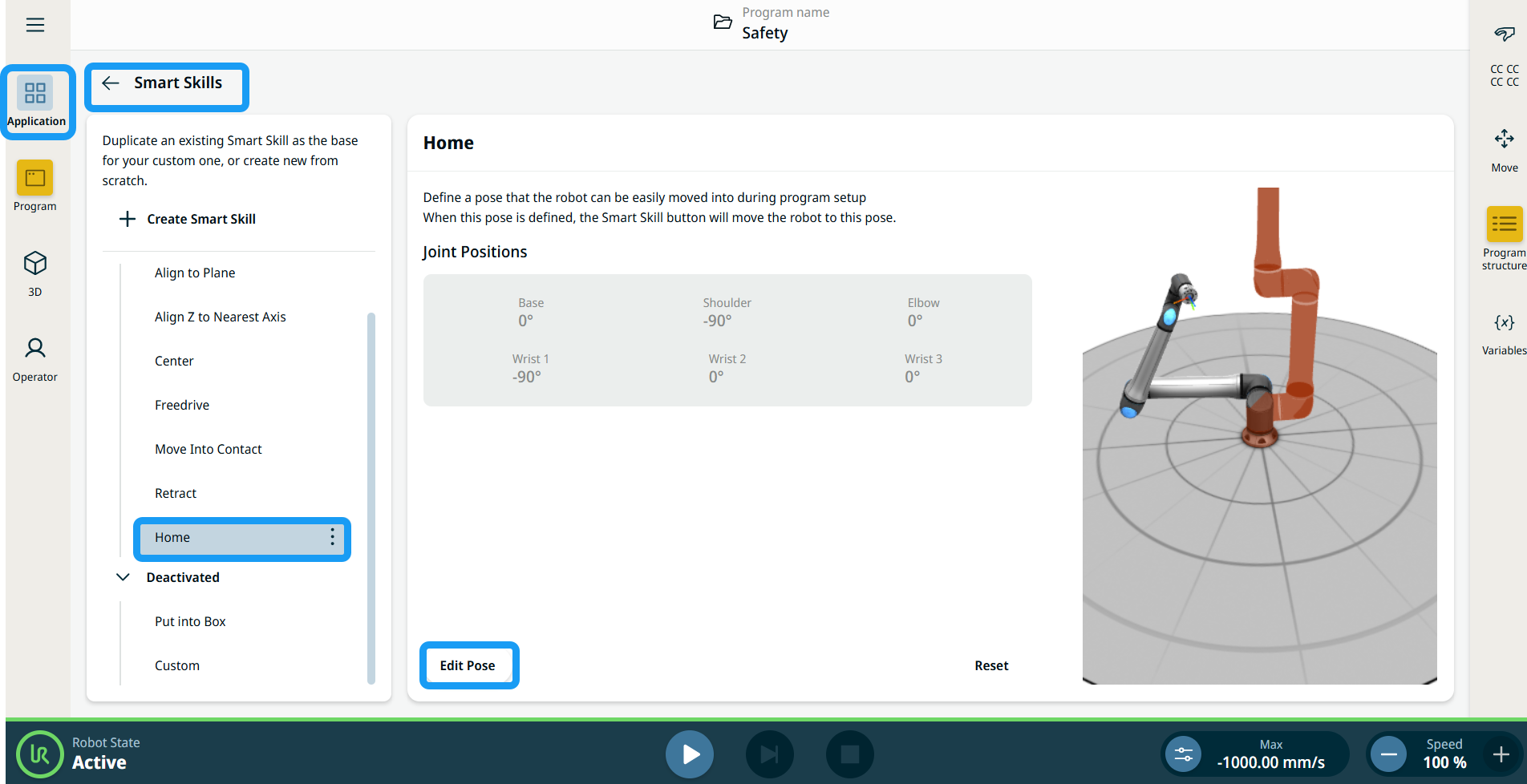
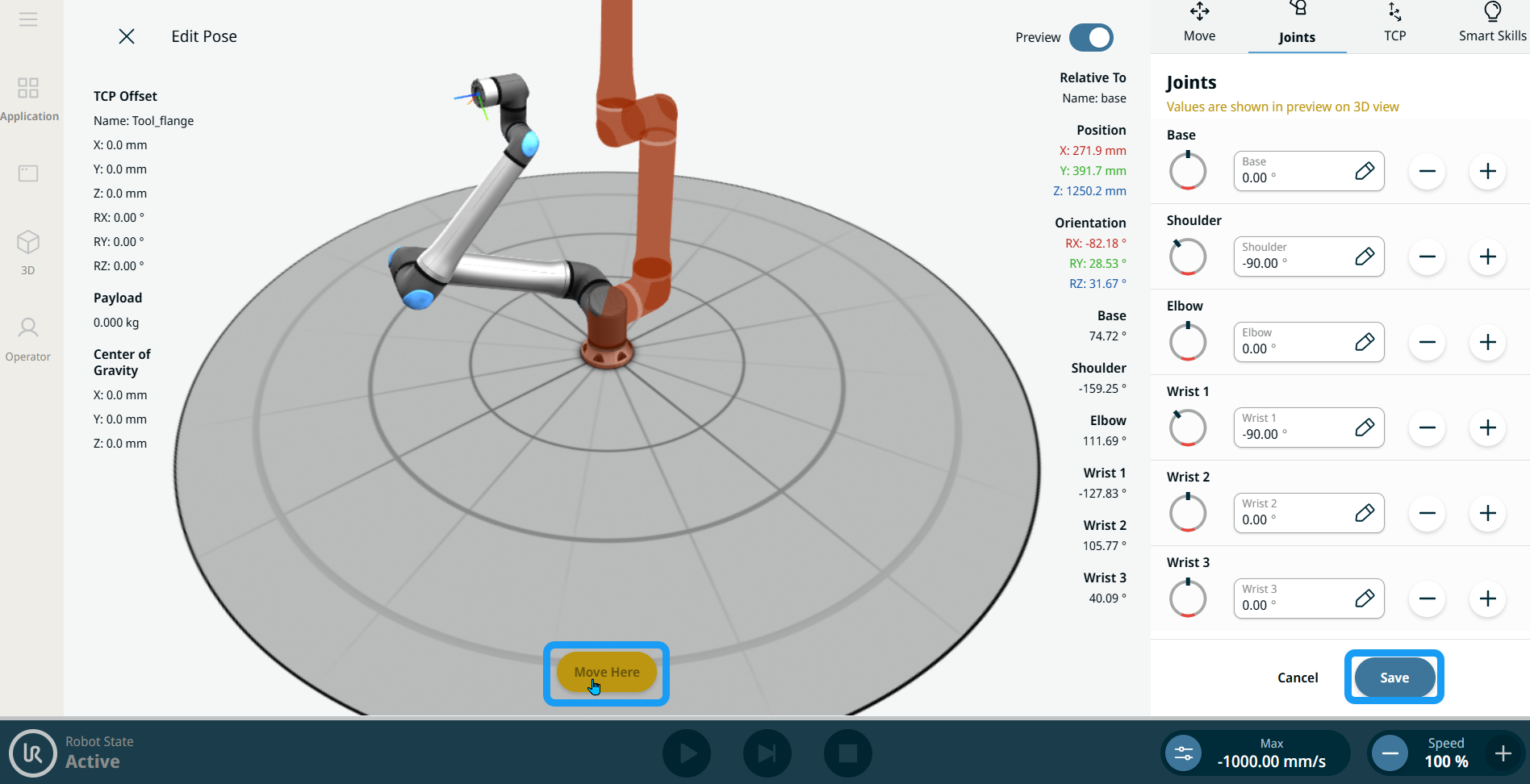
Če je za referenčno točko za varno izhodišče izbrana funkcija Position Smart Skill:
|
|
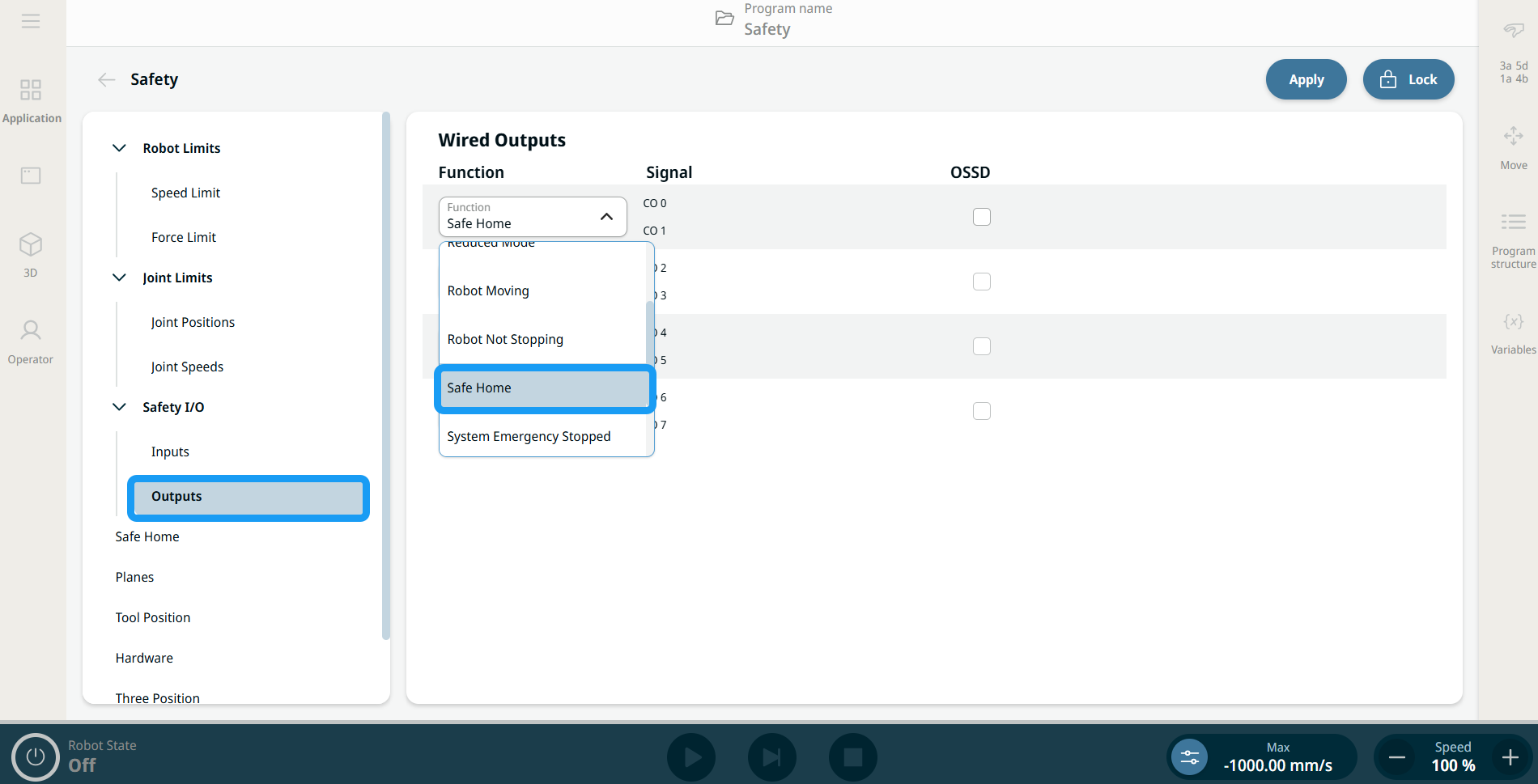
Funkcija Osnovni položaj v izhodih |
Če je položaj Domov dodeljen funkciji pametnega upravljanja v aplikaciji Varnost, spustni seznam funkcij varnostnega izhoda vsebuje Osnovni položaj kot novo dodeljeno funkcijo. V poljih Funkcija na zavihku Izhodi varnostnega V/I izberite Osnovni položaj.
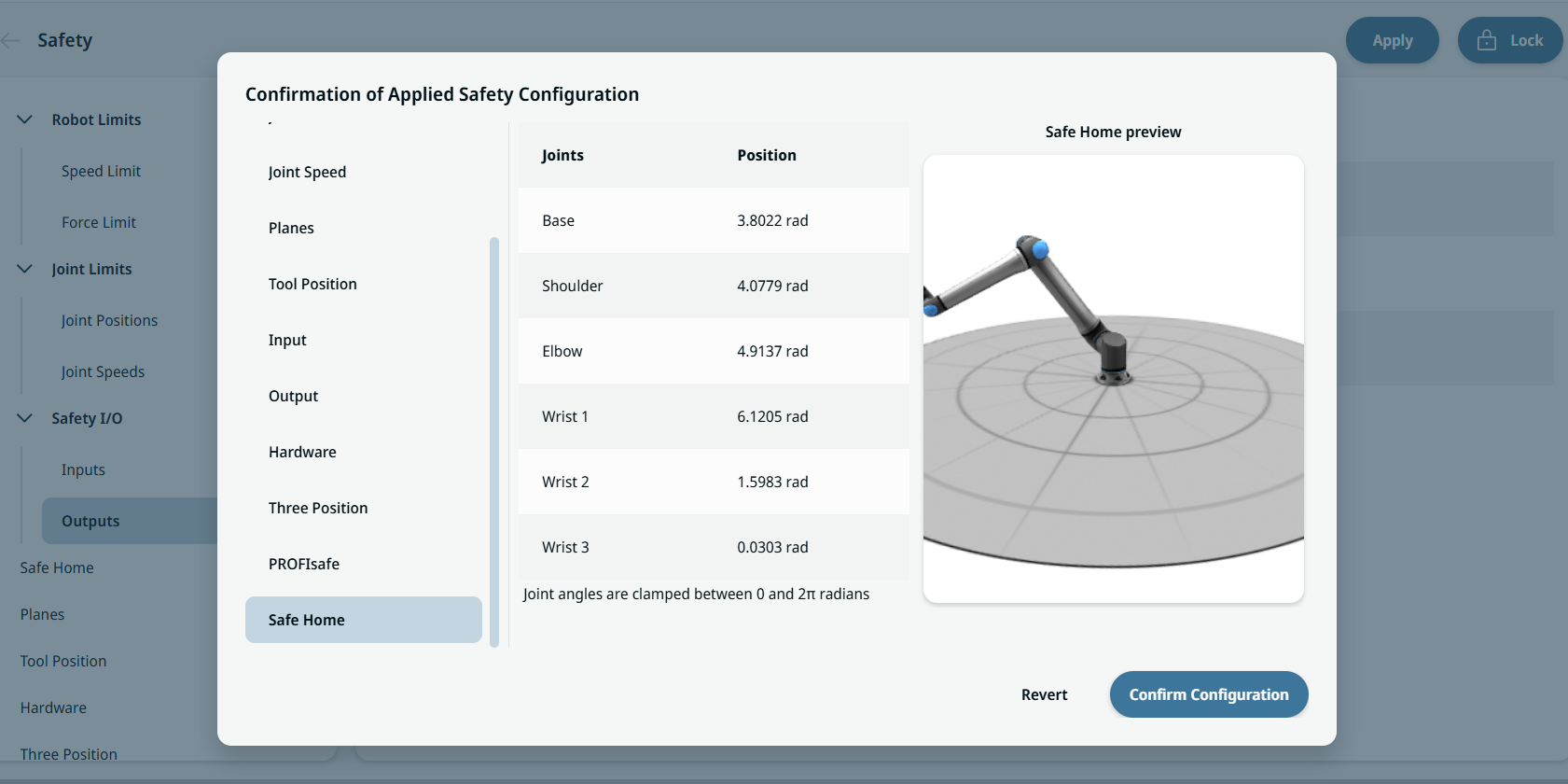
Osnovni položaj je mogoče videti v tabeli dodelitve funkcij v preglednem pogovornem oknu Potrditev uporabljene varnostne konfiguracije.
|
|
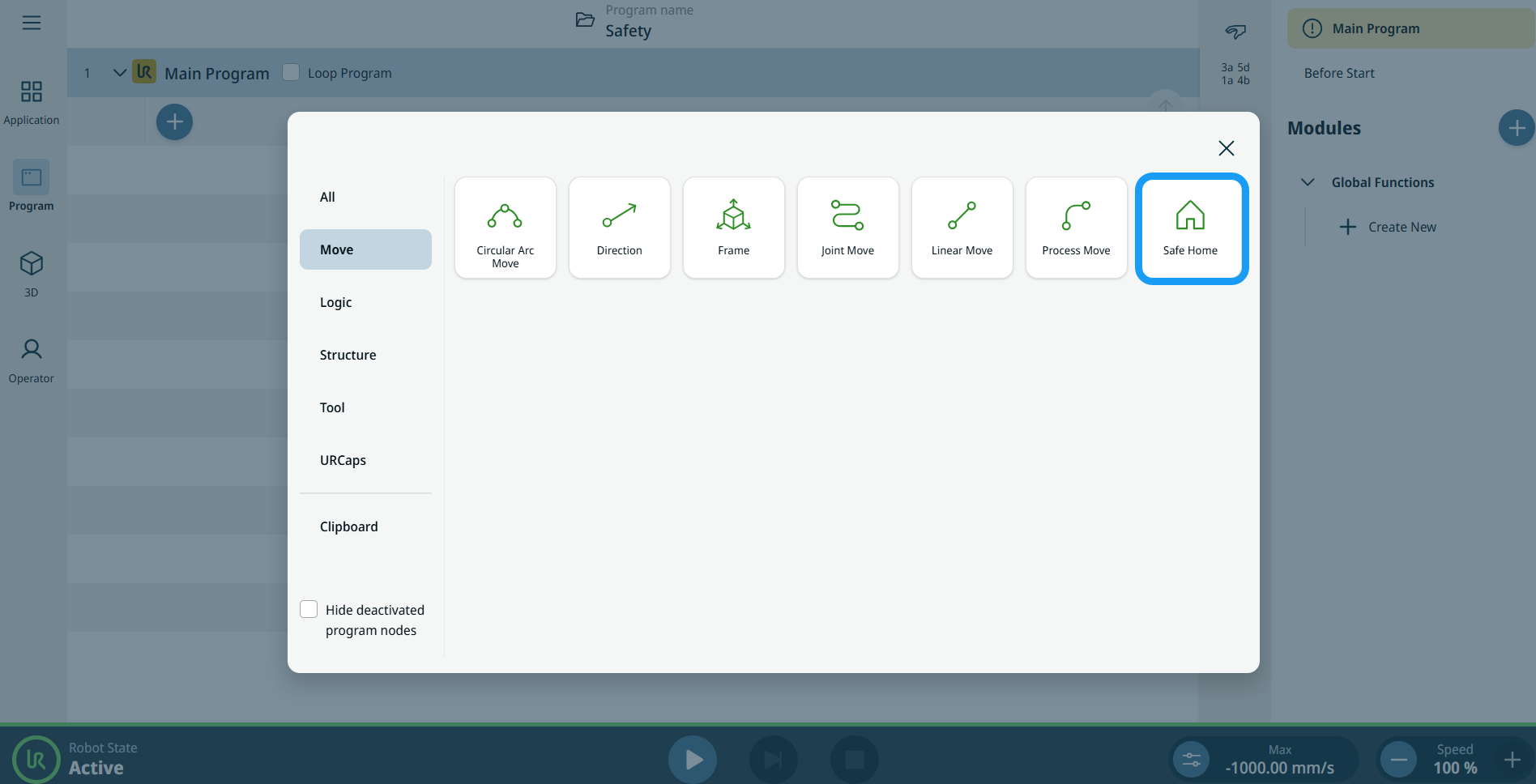
Osnovni položaj kot programsko vozlišče |
Programsko vozlišče Osnovni položaj se nahaja v kategoriji Premik vozlišč znotraj Ukazna vozlišča. To vozlišče se uporablja za ukaz robotu, da se premakne na vnaprej določeni osnovni položaj za varnost, kot je konfigurirano v nastavitvah aplikacije Varnost za osnovni položaj.
Dodajanje vozlišča brez osnovnega položaja za varnost, nastavljenega v aplikaciji Varnost, bo vozlišče označilo kot rumeno.

Vozlišče Ukaz za Osnovni položaj ima možnosti profilov premika in druge napredne nastavitve, ko se dotaknete ikone s tremi pikami
|
 .
.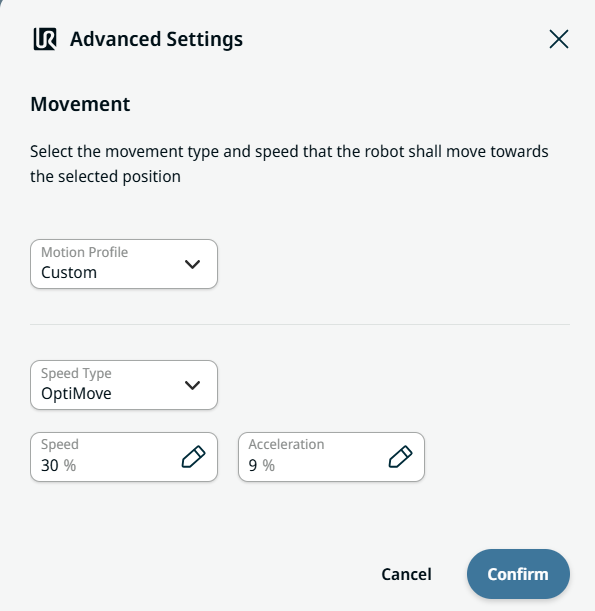
| Napredne nastavitve |
Uporabniki lahko ustvarijo profile premika v naprednih nastavitvah z uporabo dveh zavihkov in dveh polj:
Profil premika je funkcija, ki uporabnikom omogoča nastavitev vnaprej določenih profilov premika v vozliščih premika: Premik člena, Linearni premik, Premik krožnega loka, Procesni premik in Smer. Profil premika Po meri omogoča uporabnikom, da opredelijo podatke o premikanju v vozlišču premika. V polju Vrsta hitrosti je privzeta možnost OptiMove. Izberite Classic gibanje, če želite vnesti hitrost in pospešek v stopinjah na sekundo ali mm na sekundo. Nastavitve OptiMove so navedene v odstotkih, da se poenostavi uporaba in nastavitev. Uporabniki lahko nastavijo odstotek želene hitrosti v zavihku Hitrost, ki določa ciljno hitrost premikanja kot odstotek največje hitrosti robota. Uporabniki lahko v zavihku Pospešek nastavijo odstotek želenega pospeška, ki določa ciljne omejitve navora med pospeševanjem in zaviranjem kot odstotek največje moči robota.
|