Deplasare pe arc de cerc
| Descriere |
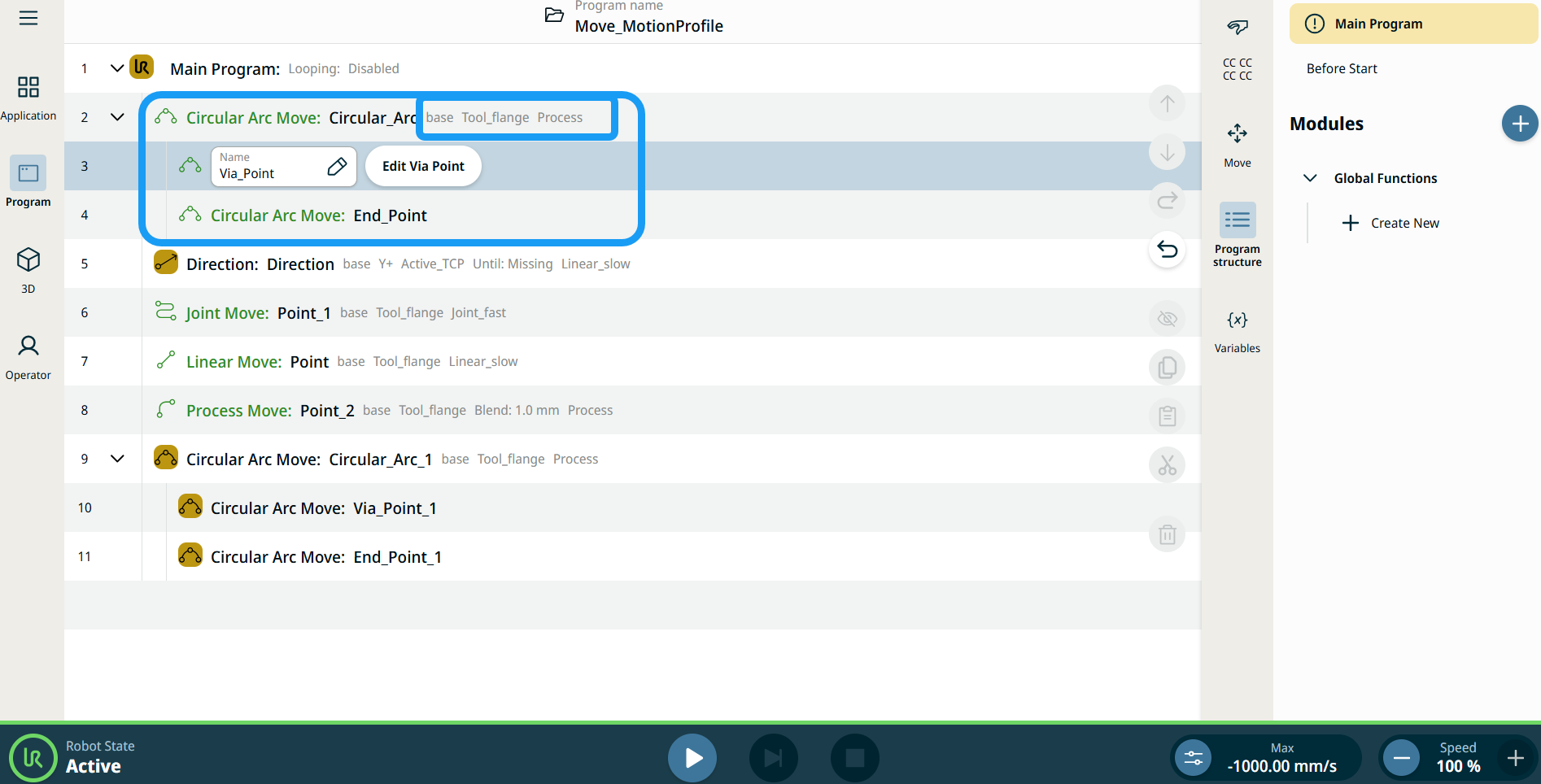
The Circular Arc Move enables you to program the robot to move in a circular motion while keeping the tool orientation either fixed or unconstrained.
|
|
To access Circular Arc Move command |
|
|
The three editable fields are:
|


| Etichetele profilului mișcării din nodurile Mișcare |
Toate nodurile de comandă legate de Mișcare din arborele programului afișează un Profil mișcare asociat cu fiecare nod. Această funcție permite utilizatorilor să vadă profilul de mișcare selectat la un nod de mișcare. Această caracteristică este implementată în următoarele noduri de comandă: Nodurile de mișcare cu profil personalizat de mișcare vor afișa valorile pentru viteză și accelerare în locul profilului de mișcare. |
|
|
|
| To access More settings |
Tap the More button, and the More settings screen appears. On the left side, you see four advanced options:
|

|
To use Orientation |
|

|
To use Movement |
|
 Two fields appear:
Two fields appear:|
To use Reference |
|

|
To use Transform |
|
|
To use Circular Arc Move: Via_point |
|

|
To use Circular Arc Move: End_Point |
|
