Movimento de arco circular
| Descrição |
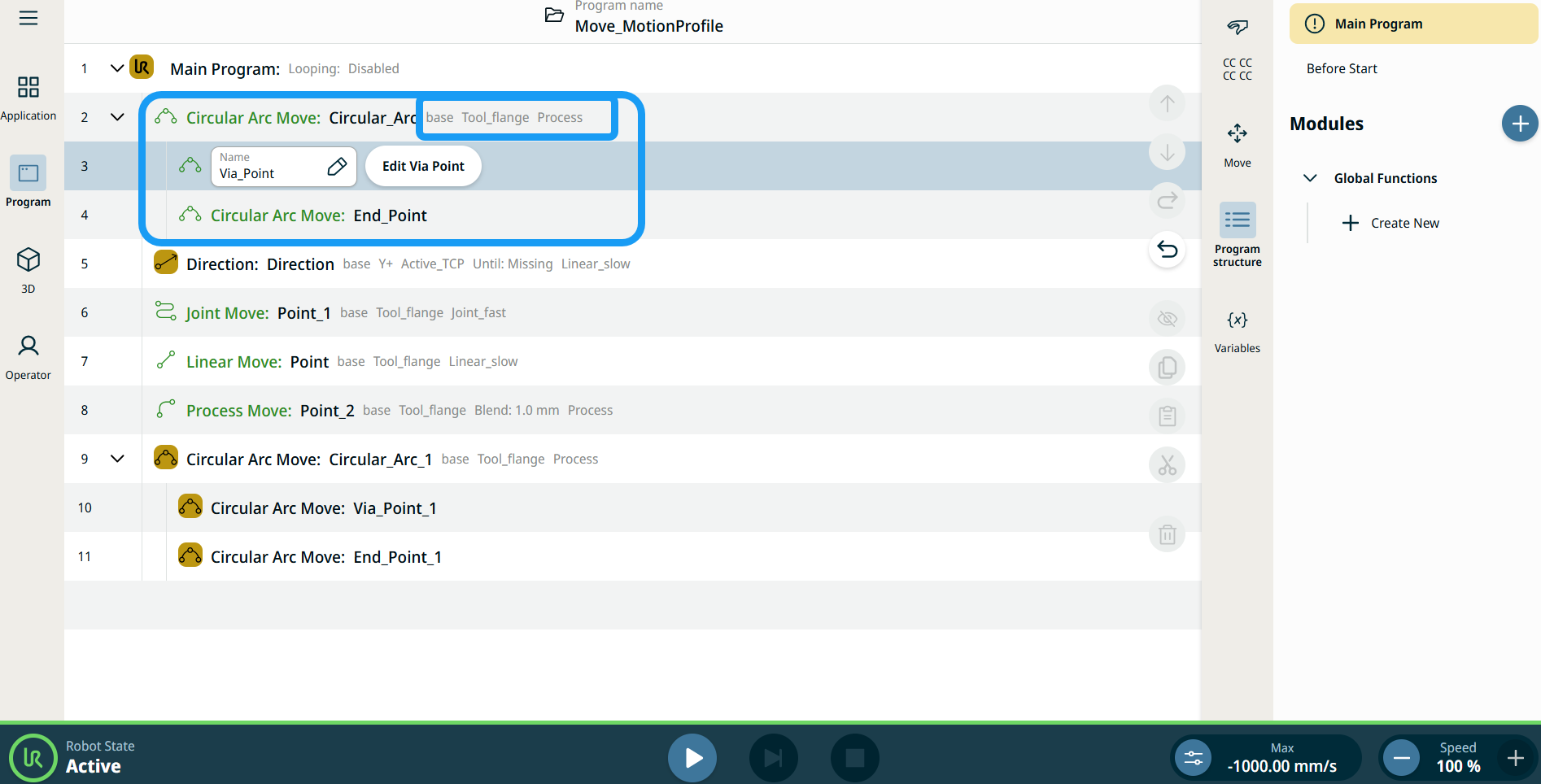
The Circular Arc Move enables you to program the robot to move in a circular motion while keeping the tool orientation either fixed or unconstrained.
|
|
To access Circular Arc Move command |
|
|
The three editable fields are:
|


| Etiquetas de perfil de movimento nos nós de movimento |
Todos os comandos de Mover relacionados a nós na árvore do programa apresentam o perfil Movimento associado a cada nó. Esta funcionalidade permite aos utilizadores ver o Perfil de Movimento selecionado num nó Move. Esta funcionalidade está implementada nos seguintes nós de comando: Os nós com perfil de movimento personalizado apresentarão os valores de velocidade e aceleração em vez do perfil de movimento. |
|
|
|
| To access More settings |
Tap the More button, and the More settings screen appears. On the left side, you see four advanced options:
|

|
To use Orientation |
|

|
To use Movement |
|
 Two fields appear:
Two fields appear:|
To use Reference |
|

|
To use Transform |
|
|
To use Circular Arc Move: Via_point |
|

|
To use Circular Arc Move: End_Point |
|
