Limite de torque de aperto do pulso
| Descrição |
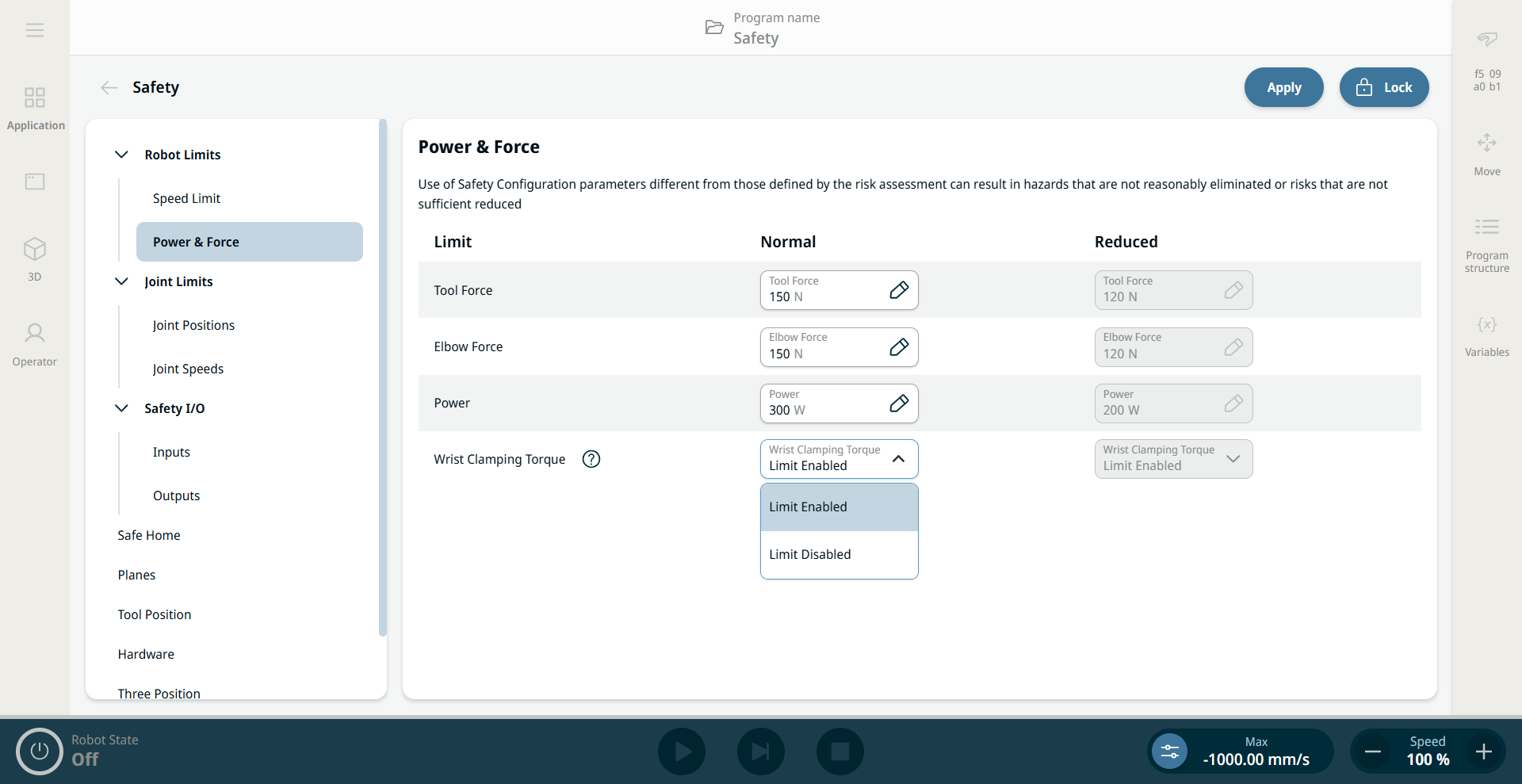
Limite de torque de aperto do pulso é uma configuração que ativa ou desativa a limitação do binário de fixação máximo para as articulações do pulso do robô. A limitação está ativada por defeito. Esta função de segurança limita o torque que o pulso pode aplicar ao empurrar.
|
|
Detalhes sobre o limite de torque de aperto do pulso |
Quando ativado, o robô limita o torque nas articulações do pulso para evitar o aperto entre o pulso, a carga útil e o antebraço do robô. Quando a configuração está ativada, ela também define um limite superior não classificado como seguro para as janelas de torque aplicadas nas articulações da base, do ombro e do cotovelo. Em aplicações de controlo de força, as forças de contacto alcançáveis podem ser significativamente inferiores às forças especificadas nas funções de segurança Limite de força da ferramenta e Limite de força do cotovelo.
Quando desativado, o robô pode usar uma força impulsionadora maior com as articulações do pulso, por exemplo, em aplicações controladas por força. Quando a função está desativada, os riscos de prensagem entre o pulso, a carga útil e o antebraço do robô devem ser mitigados por outros meios. Esta função de segurança está ativada em todos os robôs por padrão. Na versão 10.12 e posteriores do PolyScope X, é possível desativar esta função de segurança.
|
|
Ativar e desativar o limite de torque de fixação do pulso |
|