Primeiro arranque
| Descrição |
O primeiro arranque é a sequência inicial de ações que pode realizar com o robô após a montagem. Esta sequência inicial exige:
|
|
A não verificação da carga útil e da instalação, antes de colocar o braço do robô em funcionamento, pode provocar ferimentos em pessoas e/ou danos materiais.
Definições incorretas da carga útil e da instalação impedem que o braço do robô e a Caixa de controlo funcionem corretamente.
O arranque do robô a temperaturas mais baixas pode levar a desempenho inferior ou a paragens, devido à viscosidade do óleo e da massa lubrificante, consoante a temperatura.
|
Ligar o robô
| Para ligar o robô |
Ligar o robô liga a Caixa de Controlo e carrega o visor no ecrã TP.
|
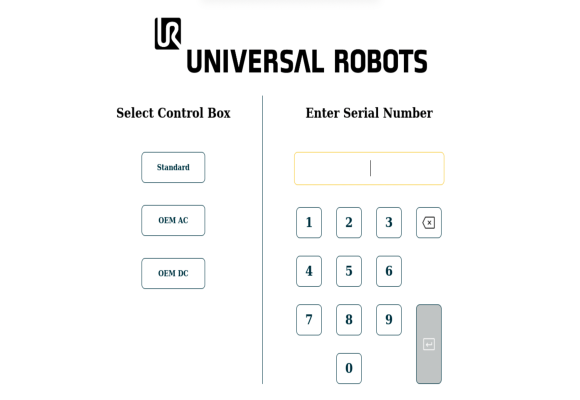
Inserção do número de série
| Para inserir o número de série |
Para instalar o robô pela primeira vez, é necessário introduzir o número de série no braço do robô. Este procedimento é também necessário quando reinstalar o software. Por exemplo, ao instalar uma atualização de software. |
|
|
O ecrã inicial pode demorar alguns minutos a carregar.
|
Ligar o braço do robô
| Para arrancar o robô |
O arranque do braço do robô desengata o sistema de travagem, permitindo mover o braço do robô e utilizar o PolyScope X.
|


Quando o estado do braço do robô muda de Inativo para Normal, os dados do sensor são comparados com a montagem configurada do braço do robô. Se a montagem estiver verificada, toque em INICIAR para continuar a desbloquear todos os travões das articulações, preparando o braço do robô para operação.
|

Desligar o robô
| Para desligar o braço do robô |
O arranque e/ou movimento inesperados podem causar ferimentos.
Agora pode:
|