Planos de E/S
| Descrição |
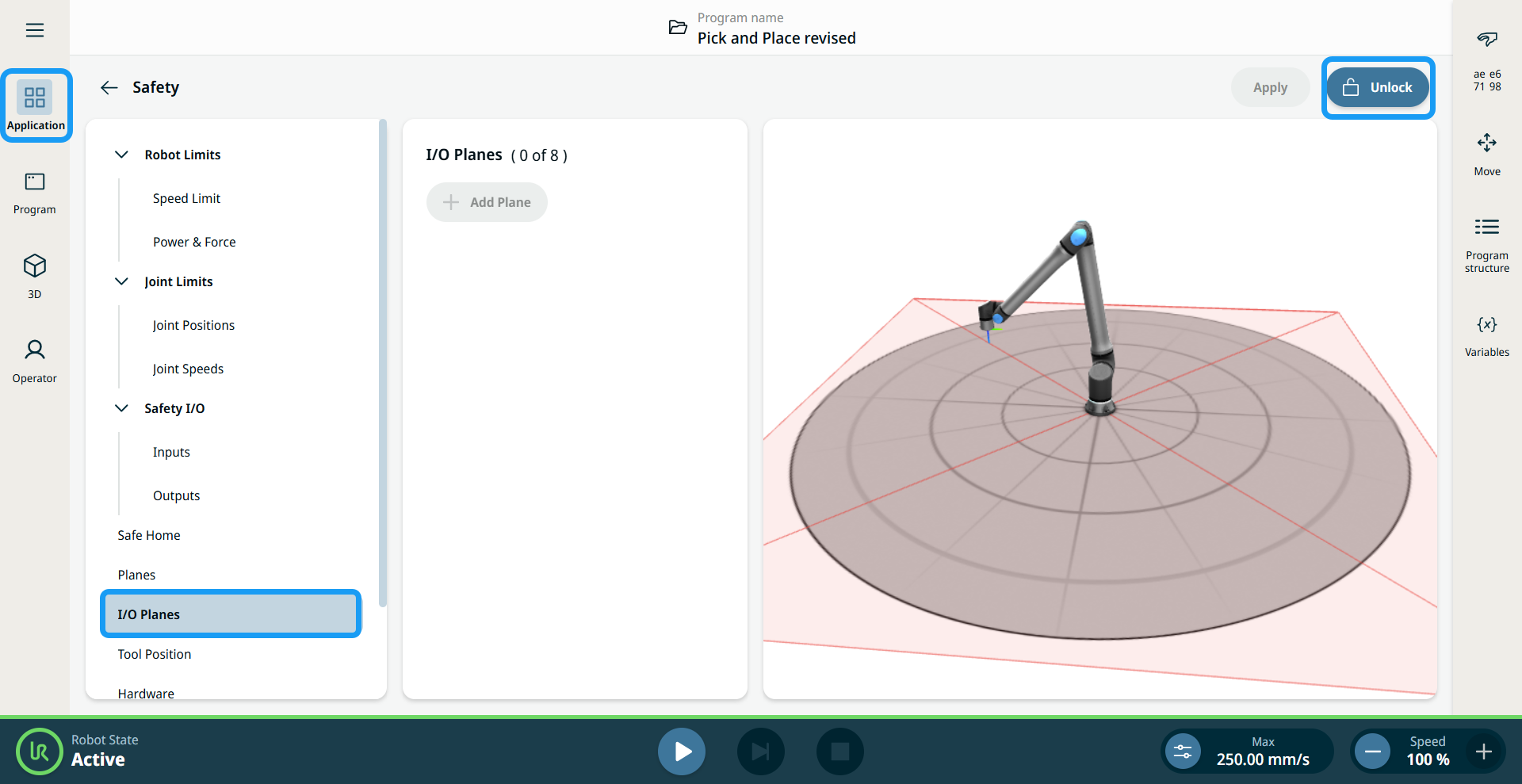
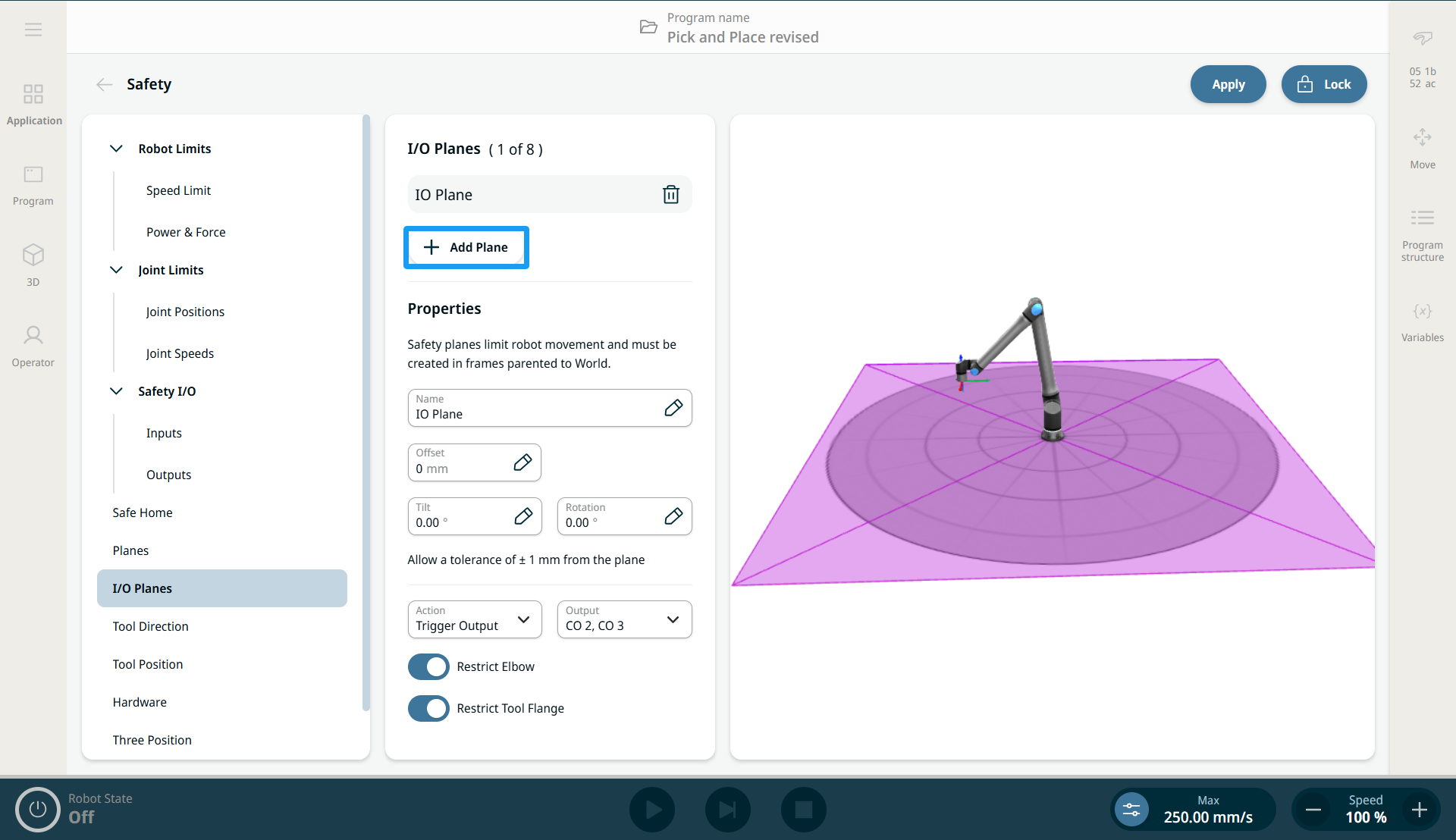
A funcionalidade I/O Planes permite uma utilização mais flexível dos planos de segurança em comparação com a funcionalidade standard Planos de segurança padrão. Permite ativar e desativar os planos de segurança através de entradas de terminais e/ou gerar um sinal de saída quando as esferas de segurança atravessam um plano de segurança.
|
|
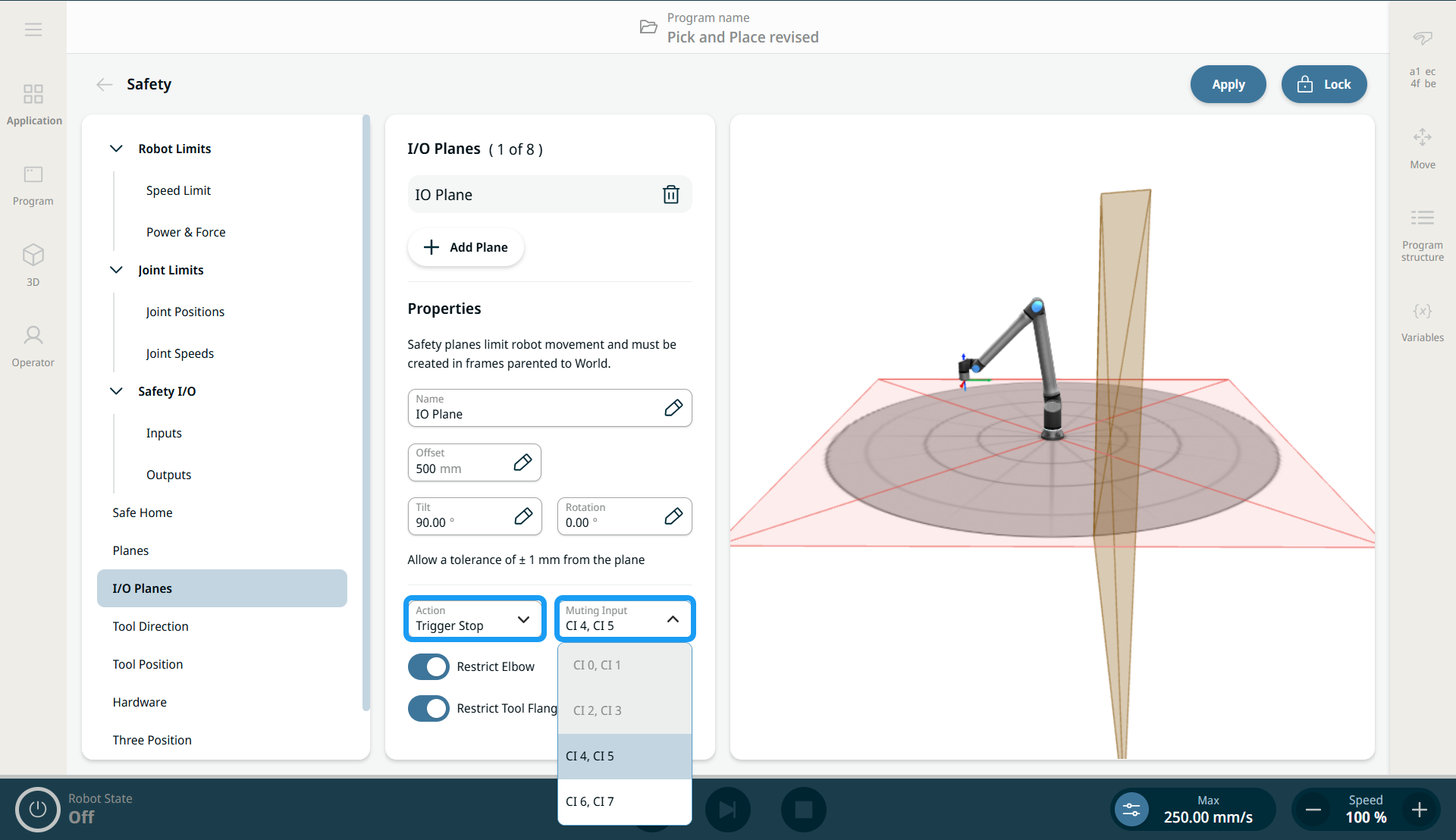
Plano de entrada/paragem |
O acionamento de paragem desencadeia uma paragem do plano de E/S. Pode ser silenciado através de uma entrada de segurança. A menos que seja silenciado, o movimento em direção ao avião faz com que o robô pare e espere até que a entrada de segurança silencie o avião. Quando o plano está inativo, o robô pode mover-se livremente. Quando o plano está ativo e o robô ainda não o atravessou, o robô pára antes de atravessar o plano. Se o plano for ativado, enquanto o robô se move na borda do plano, o robô pode acabar por atravessar o plano e, na pior das hipóteses, irá parar de acordo com os limites de distância e tempo de paragem configurados. Quando o plano é ativado e o robô atravessou o plano, o robô pára de acordo com os limites de distância de paragem e de tempo de paragem configurados.
|
|
|
|
|
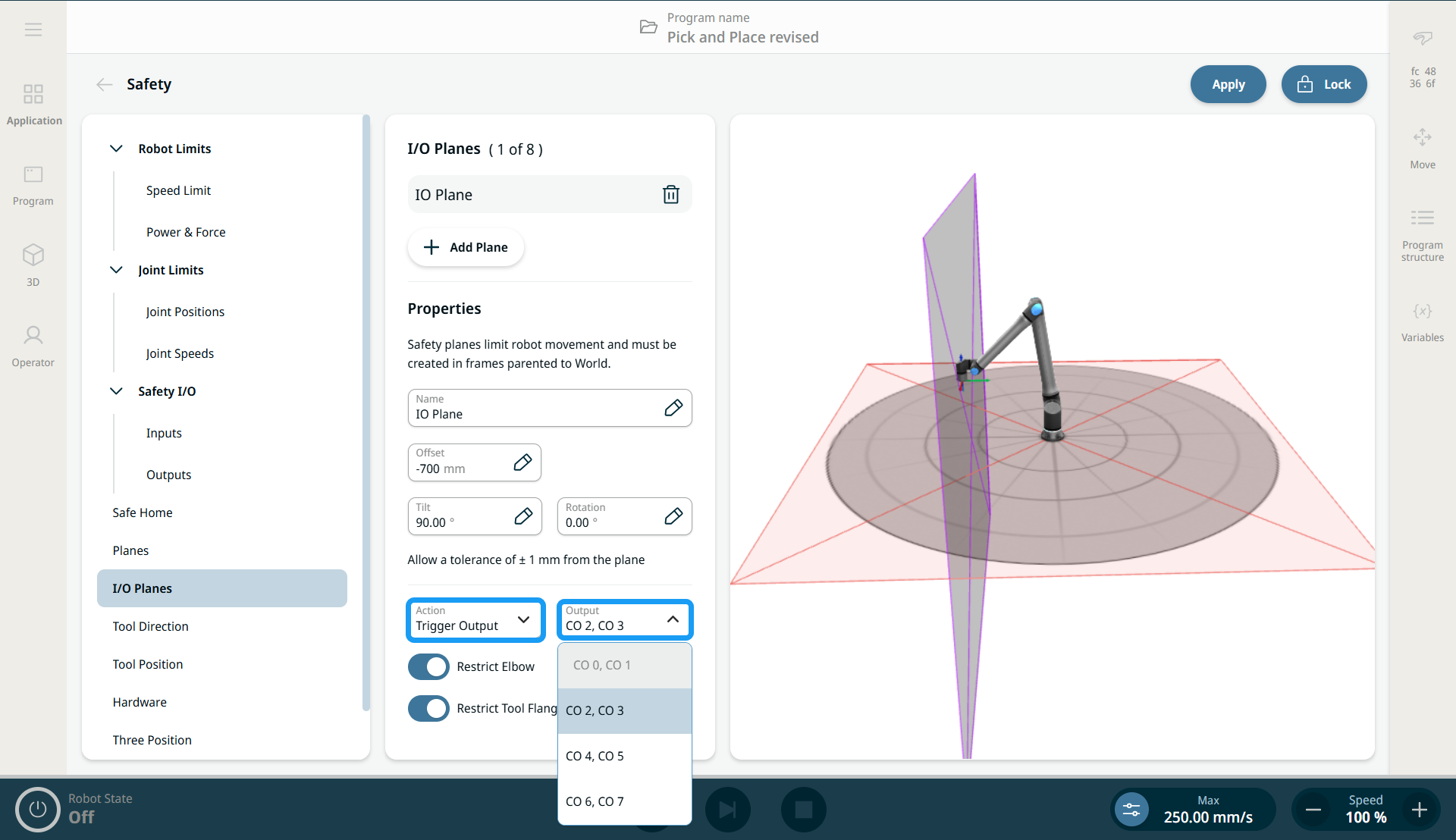
Plano de saída |
A saída de disparo gera uma saída de segurança com base no facto de uma ou mais esferas de segurança terem atravessado o plano. Quando uma ou várias esferas de segurança atravessam um plano definido como saída de disparo, a saída de segurança correspondente a esse plano é activada. "Ativado" significa que as saídas de segurança estão eletricamente definidas como "Baixo". Quando uma das esferas de segurança atravessar um plano definido como saída de disparo, a saída de segurança correspondente a esse plano é activada.
|