E/S de Segurança
| Descrição |
As E/S estão divididas entre entradas e saídas, e estão emparelhadas de modo que cada função forneça uma capacidade PLd de Categoria 3.
Ao iniciar programas a partir de uma entrada de E/S ou fieldbus, o robô pode iniciar o movimento a partir da posição que tem, não será necessário qualquer movimento manual para o primeiro ponto de passagem através do PolyScope.
|
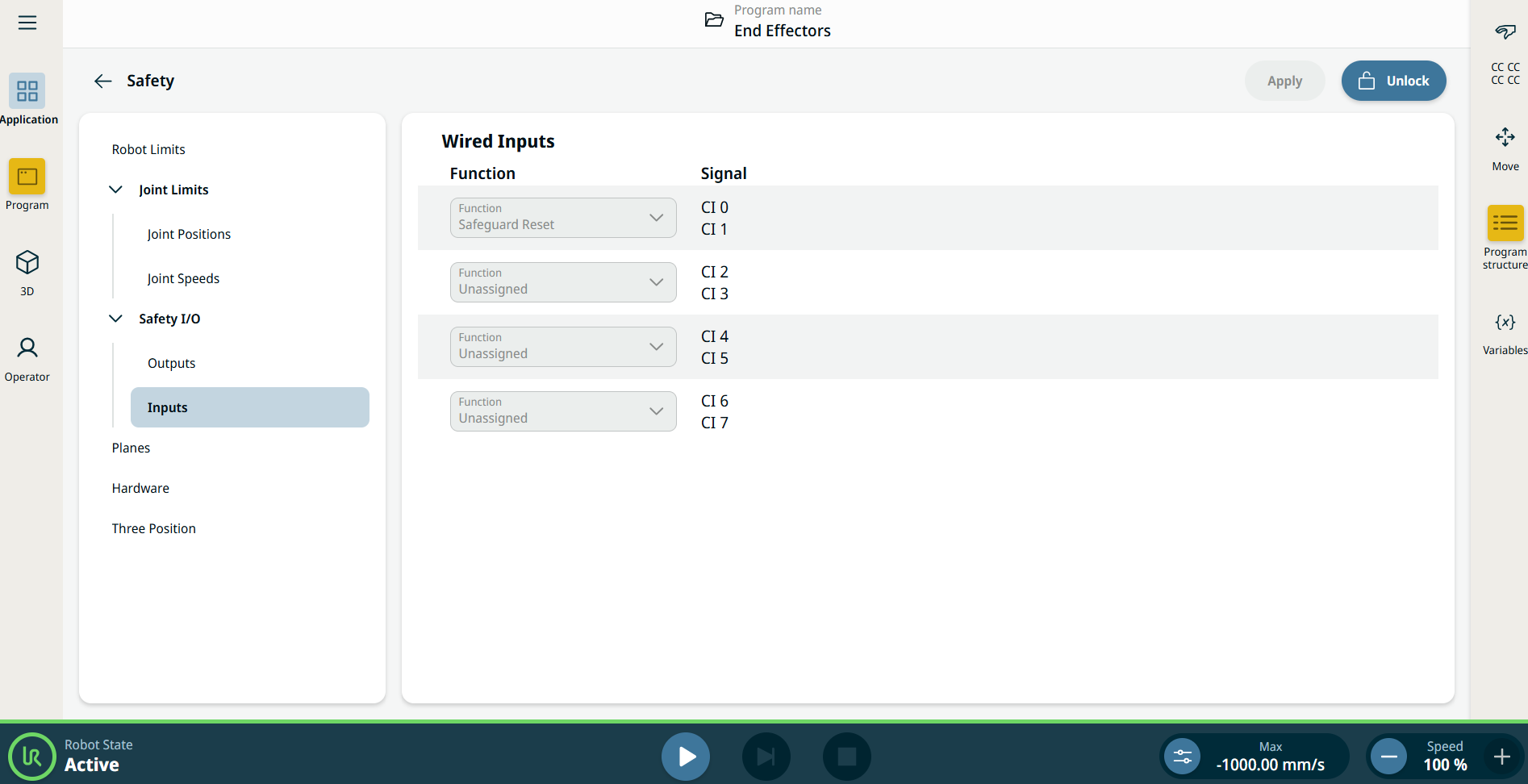
| Entradas da caixa de controlo |
As entradas são descritas no quadro seguinte:
Quando a reposição de segurança predefinida está desativada, ocorre uma reposição automática quando a segurança deixa de desencadear uma paragem. Isto pode acontecer se uma pessoa passar pelo campo da proteção. Se uma pessoa não for detetada pelo dispositivo de proteção e estiver exposta a riscos, a reposição automática é proibida pelas normas.
Quando a Paragem de segurança do modo automático está ativada, não é acionada uma paragem de segurança no modo manual.
|
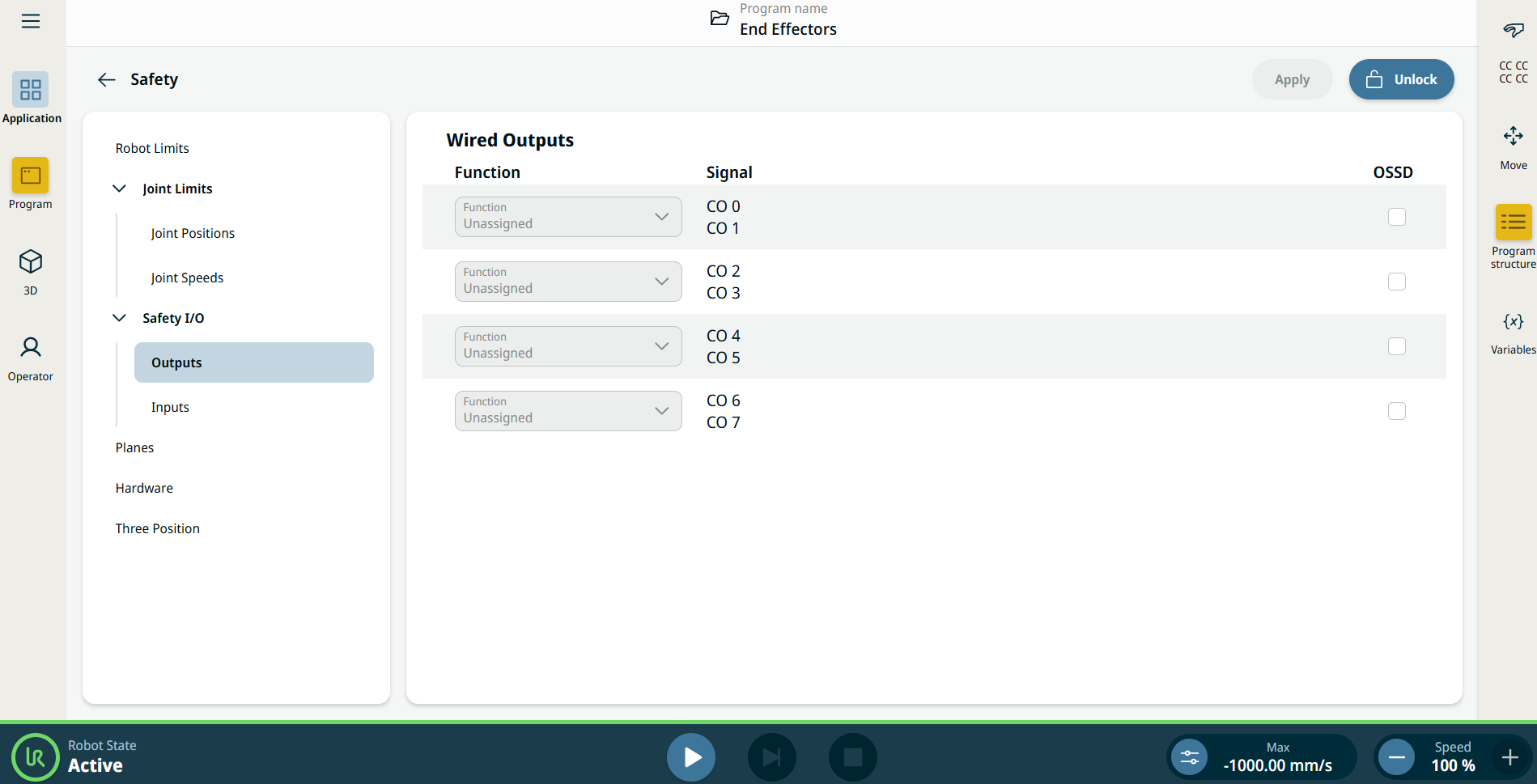
| Saídas da caixa de controlo |
Todas as saídas de segurança são ativadas em caso de violação ou falha do sistema de segurança. Isto significa que a saída de paragem do sistema inicia uma paragem mesmo quando não é acionada uma paragem de emergência. É possível utilizar os seguintes sinais de saída das funções de segurança. Todos os sinais retornam ao valor baixo quando o estado que acionou o sinal alto está concluído:
Qualquer máquina externa que receba o seu estado de paragem de emergência do robô através da saída de paragem do sistema, deve estar em conformidade com a norma ISO 13850. Isto é particularmente necessário em configurações onde a entrada Parada de Emergência do Robô está conectada a um dispositivo de Parada de Emergência externo. Nesses casos, a saída de paragem do sistema torna-se alta quando o dispositivo externo de paragem de emergência é libertado. Isto implica que o estado de paragem de emergência nas máquinas externas será reposto sem necessidade de ação manual por parte do operador do robô. Portanto, para cumprir com as normas de segurança, as máquinas externas devem exigir uma ação manual para serem reiniciadas.
|