PROFIsafe
| Descrição |
O protocolo de rede PROFIsafe (implementado na versão 2.6.1) permite que o robô comunique com um PLC de segurança de acordo com os requisitos da norma ISO 13849, Cat. 3 PLd. O robô transmite informações relacionadas com a segurança a um PLC de segurança e recebe informações relacionadas com a segurança. As comunicações relacionadas com a segurança podem ser mensagens de estado ou servir para acionar uma função de segurança (por exemplo, configurações reduzidas, paragem). Os comandos de paragem são descritos de acordo com a norma IEC 60204-1, em que a paragem de emergência é uma paragem de Categoria 1 e a paragem de segurança é uma paragem de Categoria 2.
A interface PROFIsafe fornece uma alternativa segura e baseada em rede para conectar os fios aos pinos de E/S de segurança da caixa de controle do robô. A utilização da interface PROFIsafe mantém as especificações de segurança funcional do robô UR (PL, categoria e PFH). Para mais informações, consulte a secção «Tabela de funções de segurança» no manual da UR. Por exemplo, o «paragem de segurança» é de categoria PLd 3 com um valor PFH inferior a 1,8E-07 (1,8 x 10-7).
O PROFIsafe está disponível apenas para robôs com uma licença de ativação, que pode obter contactando o seu representante de vendas local. Após obter a licença, transfira em myUR. Consulte «Registo do robô e ficheiros de licença URCap» para obter informações sobre o registo do robô e a ativação da licença.
|
| PLC de segurança Entrada |
Uma mensagem de estado, que o robô envia ao PLC de segurança, contém as informações apresentadas na tabela seguinte.
|
||||||||||||||||
|
|
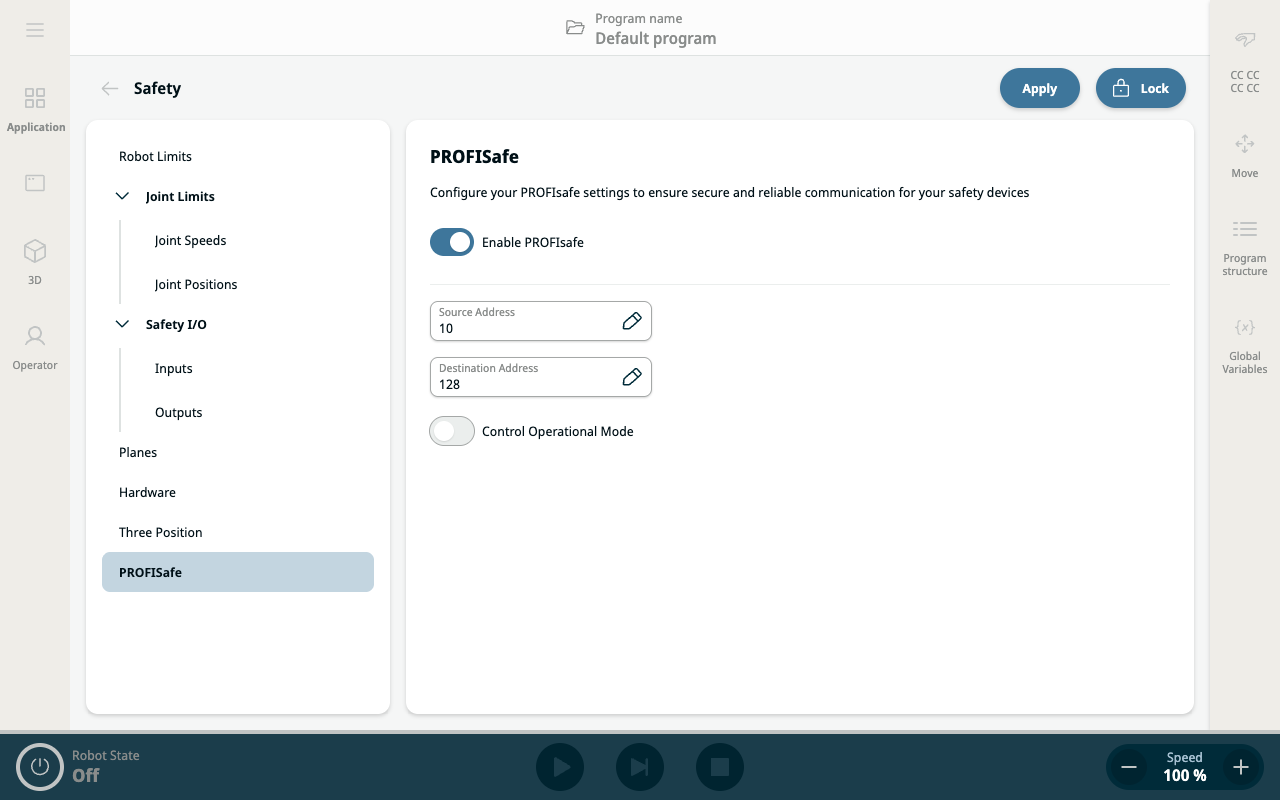
| Configurar o PROFIsafe |
|
|
|
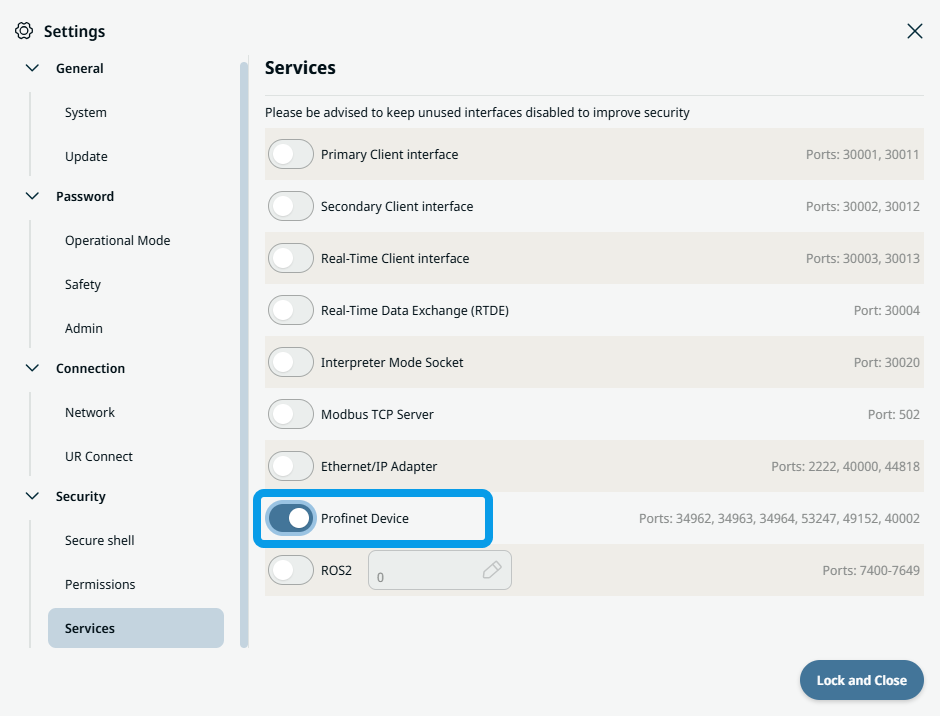
Para configurar e utilizar o PROFIsafe, o Dispositivo PROFINET deve estar ativado no menu de definições dos serviços de segurança.
 Leia para obter detalhes e a localização da interface «Profinet».
|