Casa Segura
| Descrição |
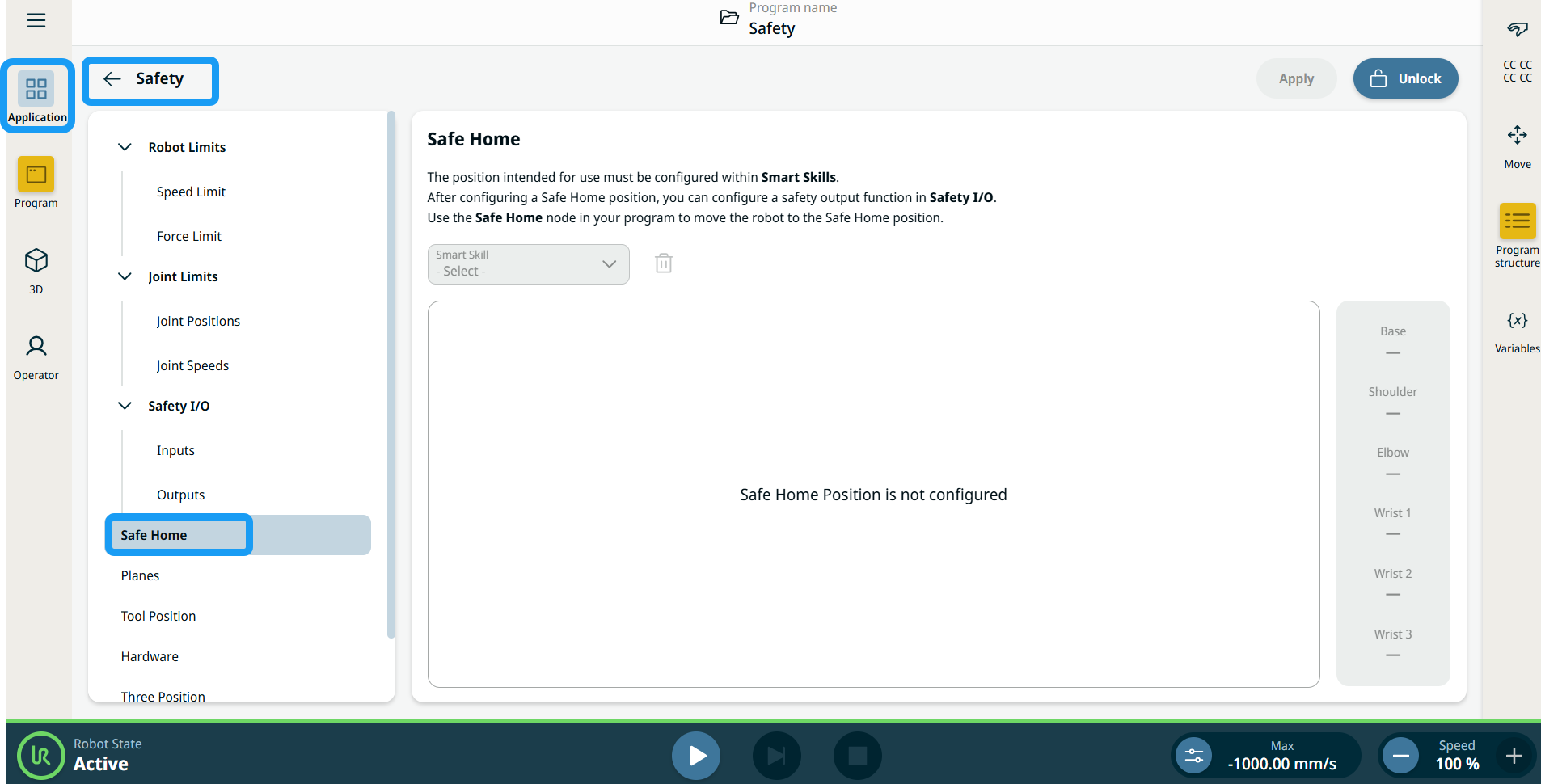
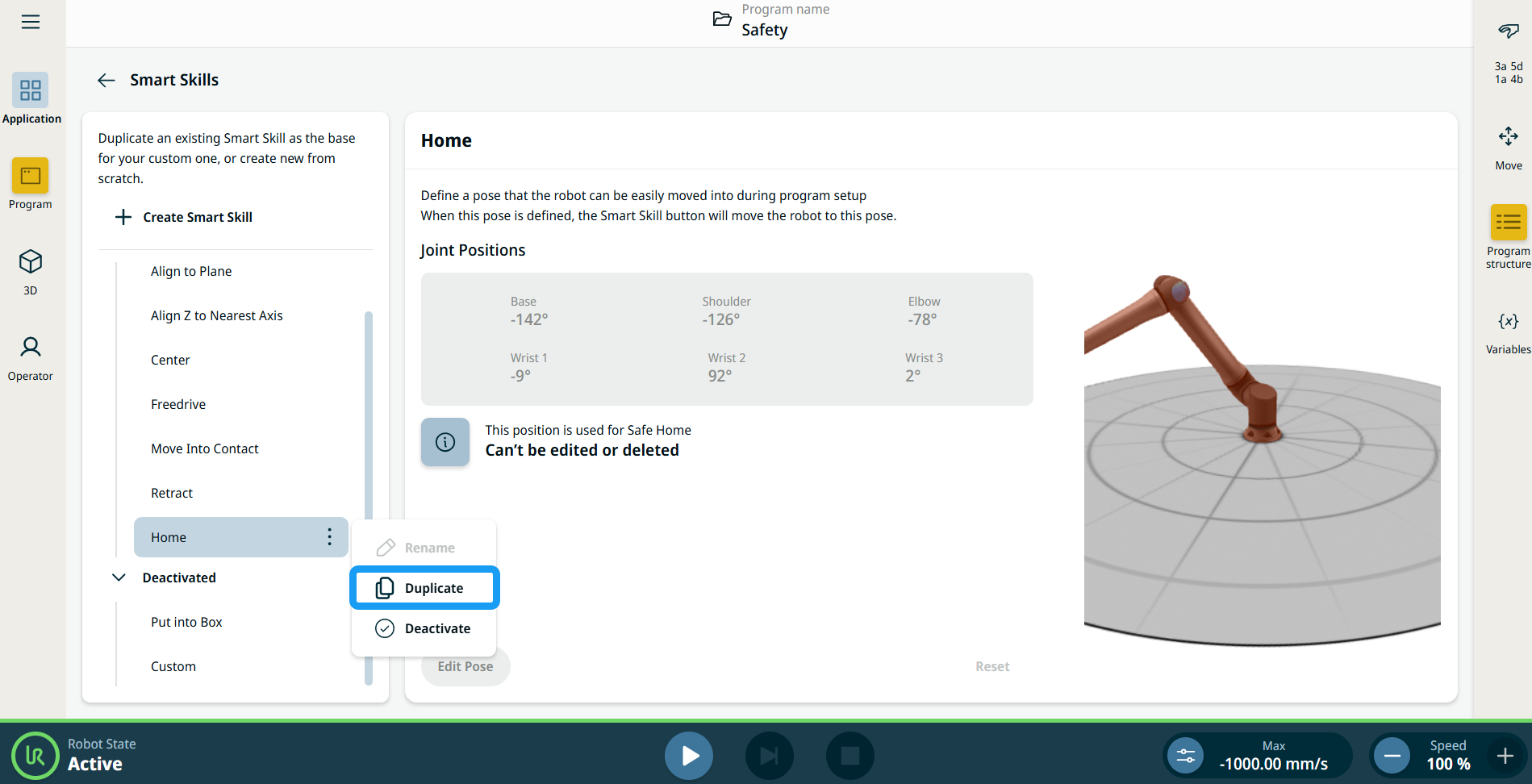
Posição inicial segura é uma funcionalidade do PolyScope X que permite aos utilizadores definir uma saída relacionada com a segurança ativada quando o robô atinge a posição inicial segura configurada. O utilizador escolhe Início no menu suspenso de posições inteligentes disponíveis, que podem ser atribuídas como referência para a Posição Inicial Segura.
|
|
Acesso à posição inicial segura |
|
|
|
|
|
|
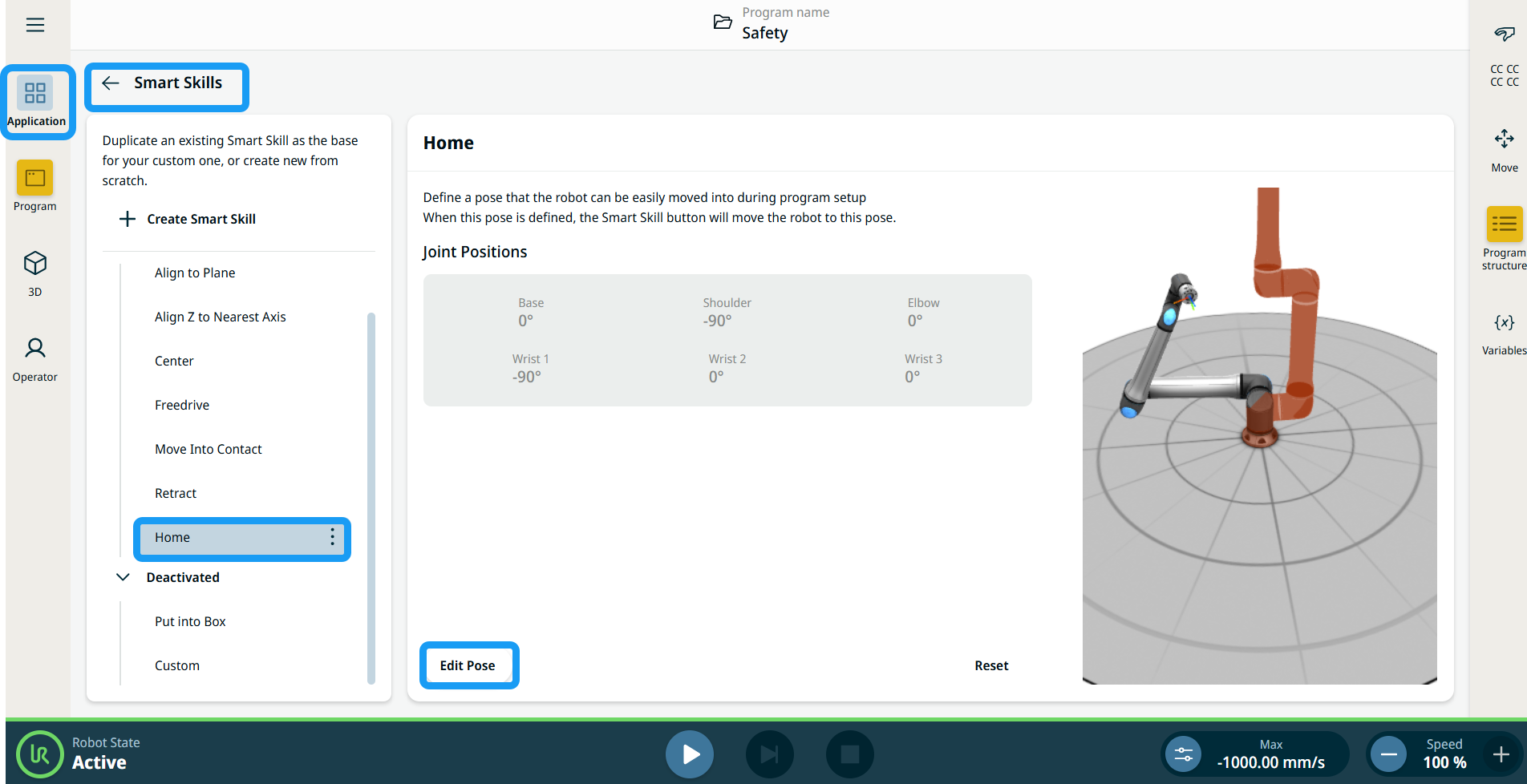
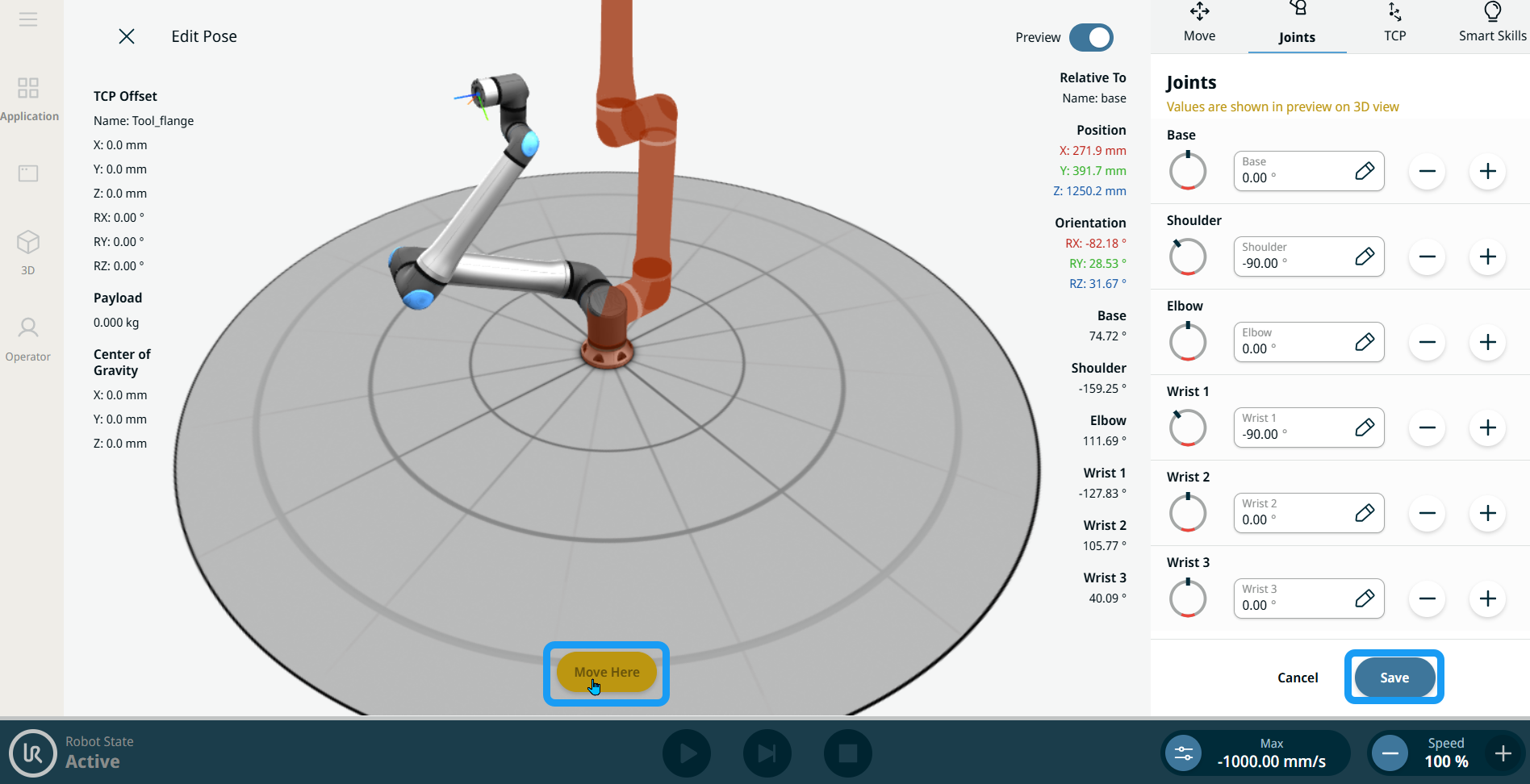
Se a função Position Smart Skill for selecionada como referência de posição para o Safe Home:
|
|
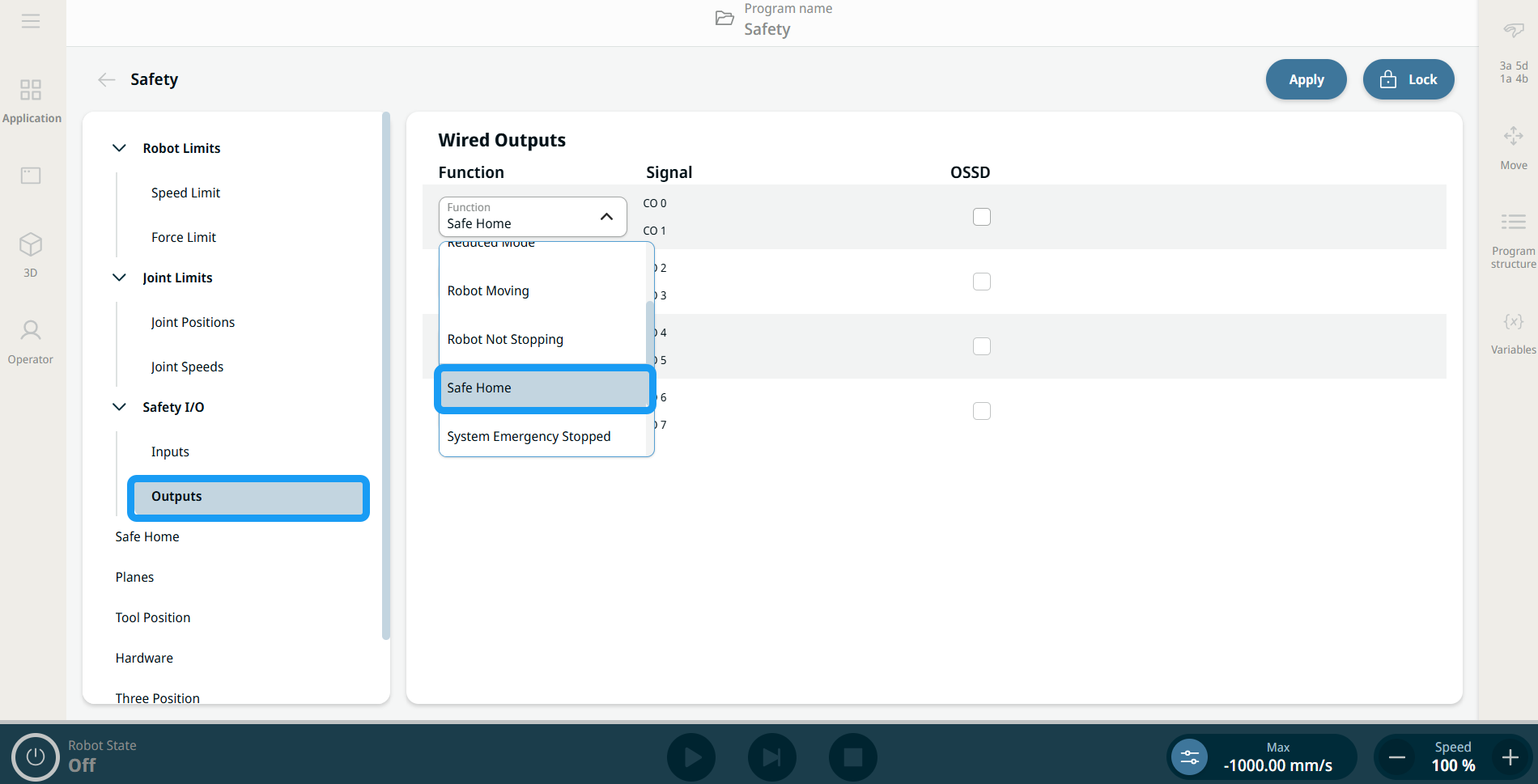
Função de posição inicial segura nas saídas |
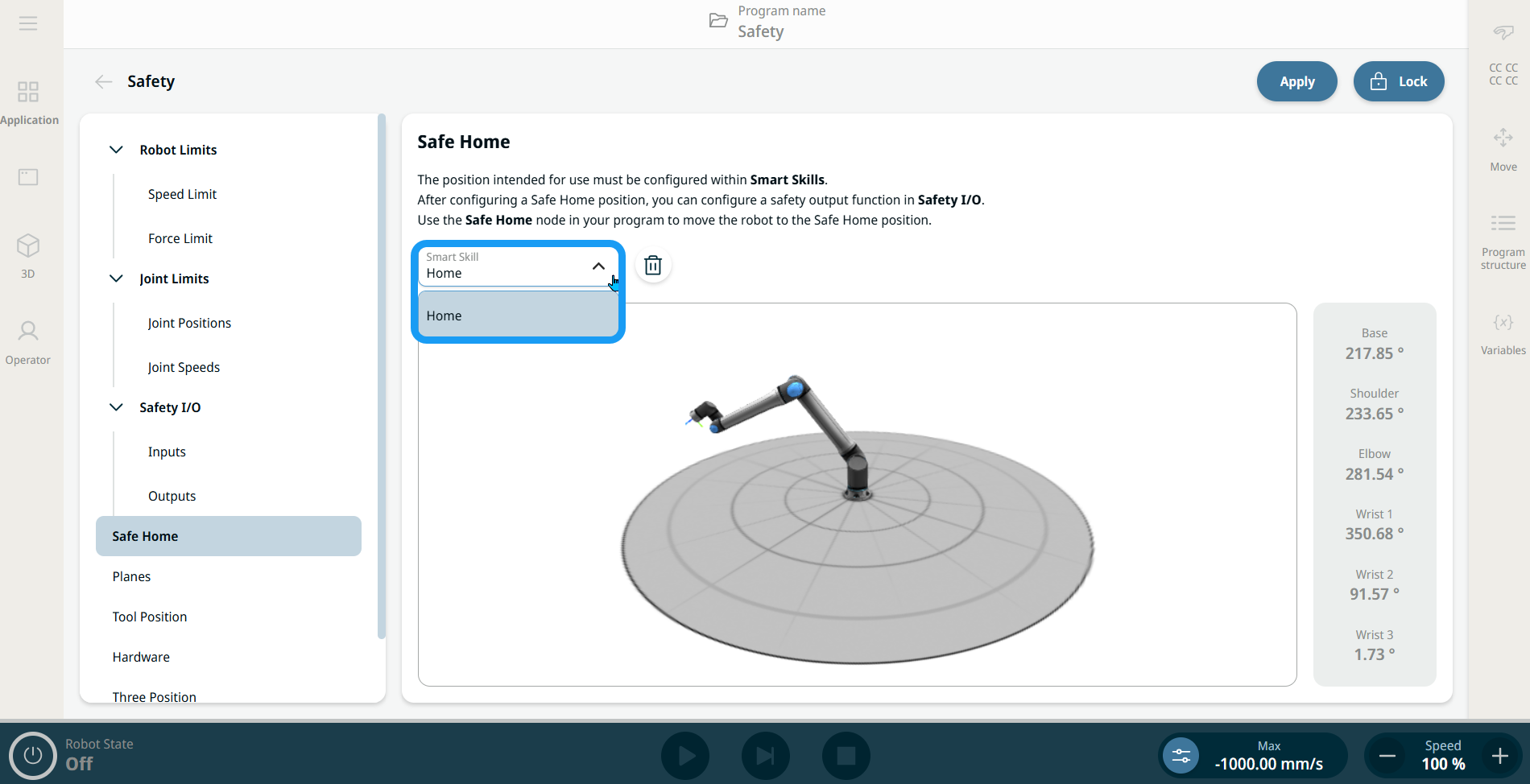
Se a posição de Início está atribuída a uma posição de smart skill em Segurança, o menu suspenso da função de saída de segurança contém a Posição inicial segura como nova atribuição de função. Escolha Posição inicial segura nos campos Função em Saídas de E/S de Segurança.
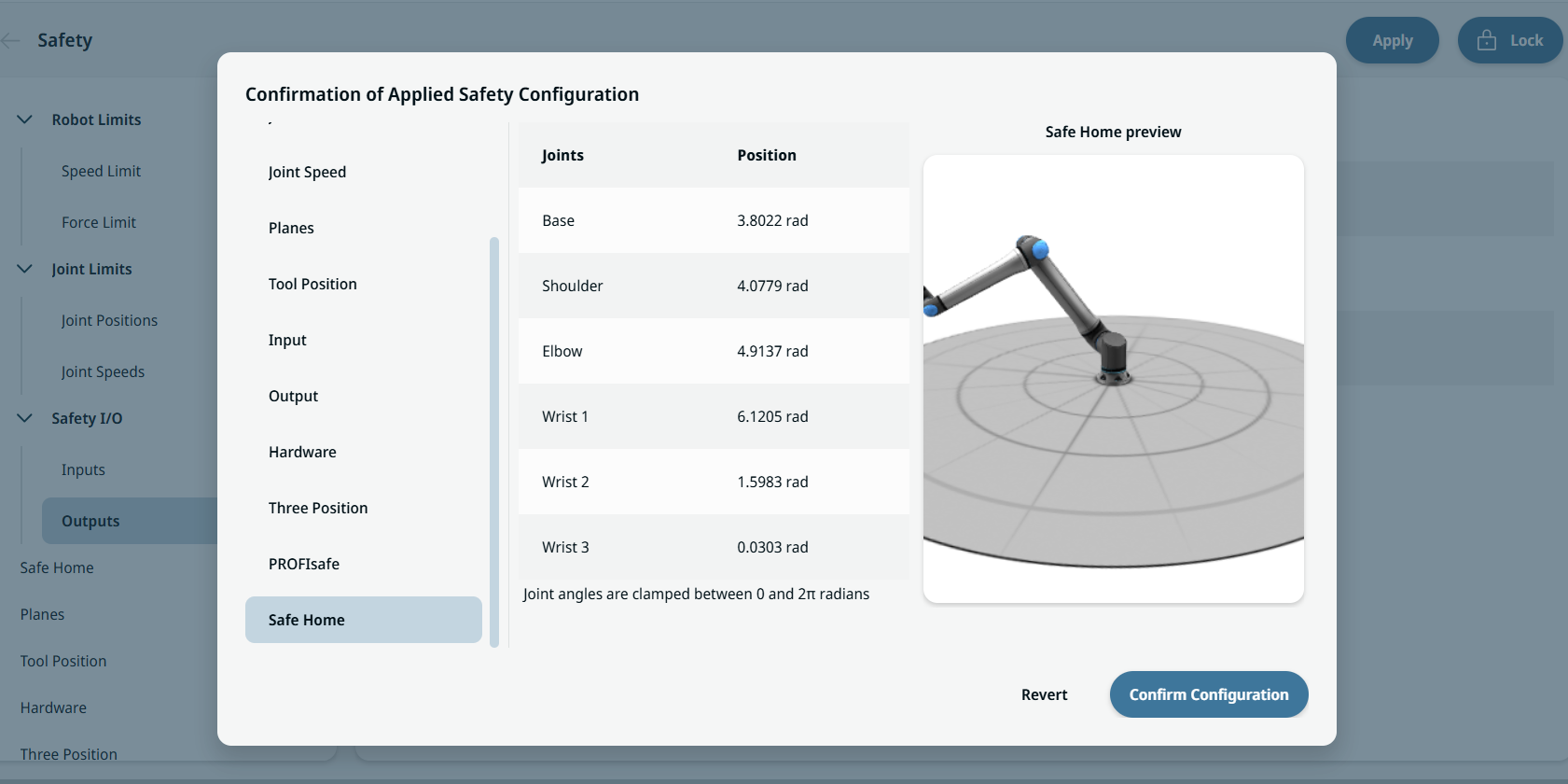
Posição inicial segura pode ser visto na tabela de atribuição de funções no diálogo de síntese Confirmação da configuração de segurança aplicada.
|
|
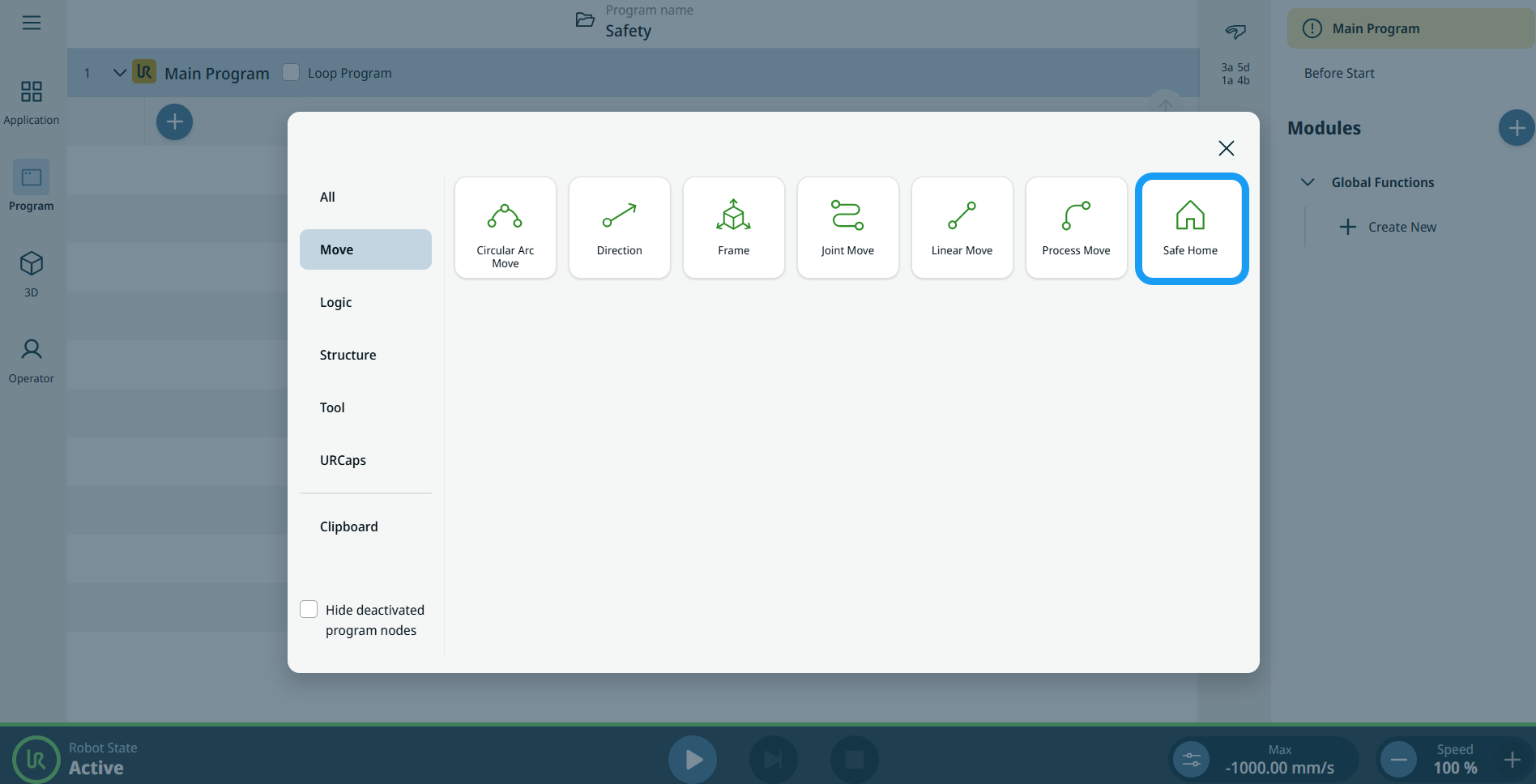
Posição inicial segura como nó do programa |
O nó de programa Posição inicial segura está localizado na categoria Mover nós nos nós de comando. Este nó é utilizado para comandar o robô a mover-se para a sua posição inicial segura predefinida, conforme configurado nas definições da aplicação de segurança para a posição inicial segura.
Adicionar o nó sem uma posição inicial segura configurada na segurança irá marcar o nó como amarelo.

O nó de comando Posição inicial segura tem opções de perfis de movimento e outras configurações avançadas quando o ícone de reticências
|
 é tocado.
é tocado.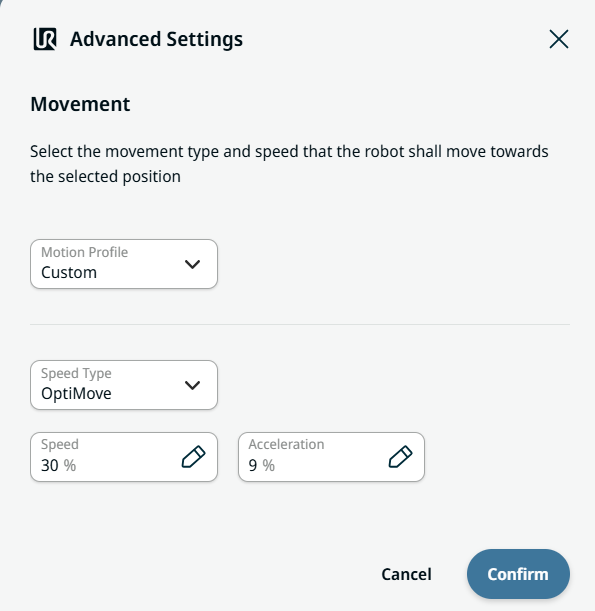
| Definições avançadas |
Os utilizadores podem criar perfis de movimento nas Definições avançadas com os dois separadores e os dois campos:
Perfil de movimento é uma funcionalidade que permite aos utilizadores definir perfis de movimento predefinidos em nós de movimento: Movimento da Articulação, Movimento Linear, Movimento em Arco Circular, Movimento de Processo e Direção. Perfil de movimento personalizado permite aos utilizadores definir dados de movimento no nó de movimento. No campo Tipo de velocidade , OptiMove é a opção padrão. Choose Classic movement if you want to input speed and acceleration in degrees per second or mm per second. As definições do OptiMove são especificadas em percentagem para simplificar a utilização e a configuração. Os utilizadores podem configurar a percentagem da velocidade preferida no separador Velocidade, que define a velocidade de deslocação alvo como uma percentagem da capacidade máxima de velocidade do robô. Os utilizadores podem configurar a percentagem de aceleração preferencial no separador Aceleração, que define os limites de binário alvo durante a aceleração e desaceleração como uma percentagem da potência máxima do robô.
|