Lineær bevegelse
| Beskrivelse |
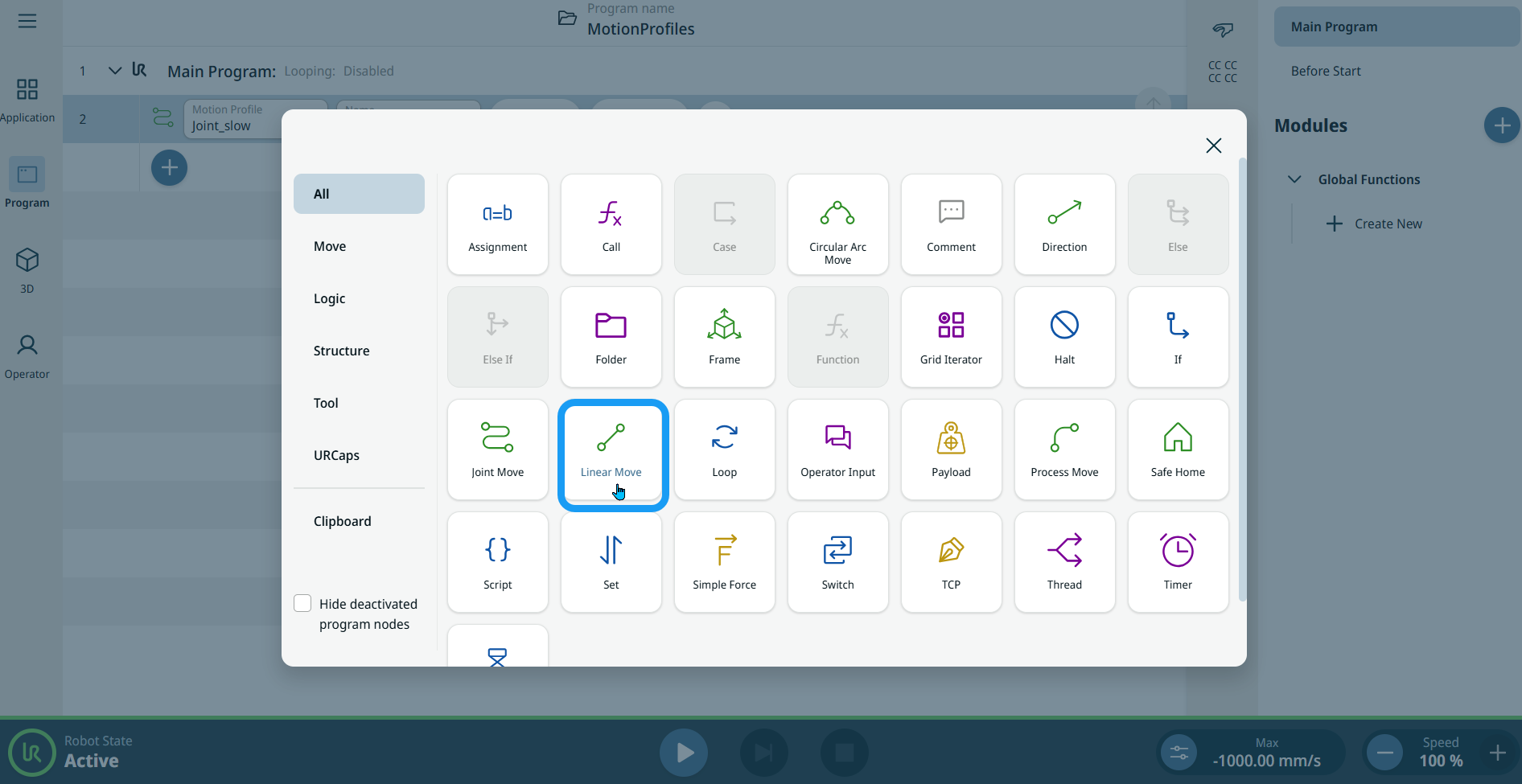
The Linear Move command node supports Motions Profiles as Joint Move, but it creates a movement that is a direct line from point A and point B. It moves the Tool Center Point (TCP) linearly between waypoints. Dette betyr at hvert ledd utfører en mer komplisert bevegelse for å holde verktøyet i en rett bane.
|
|
To access Linear Move command |
|
|
|
|
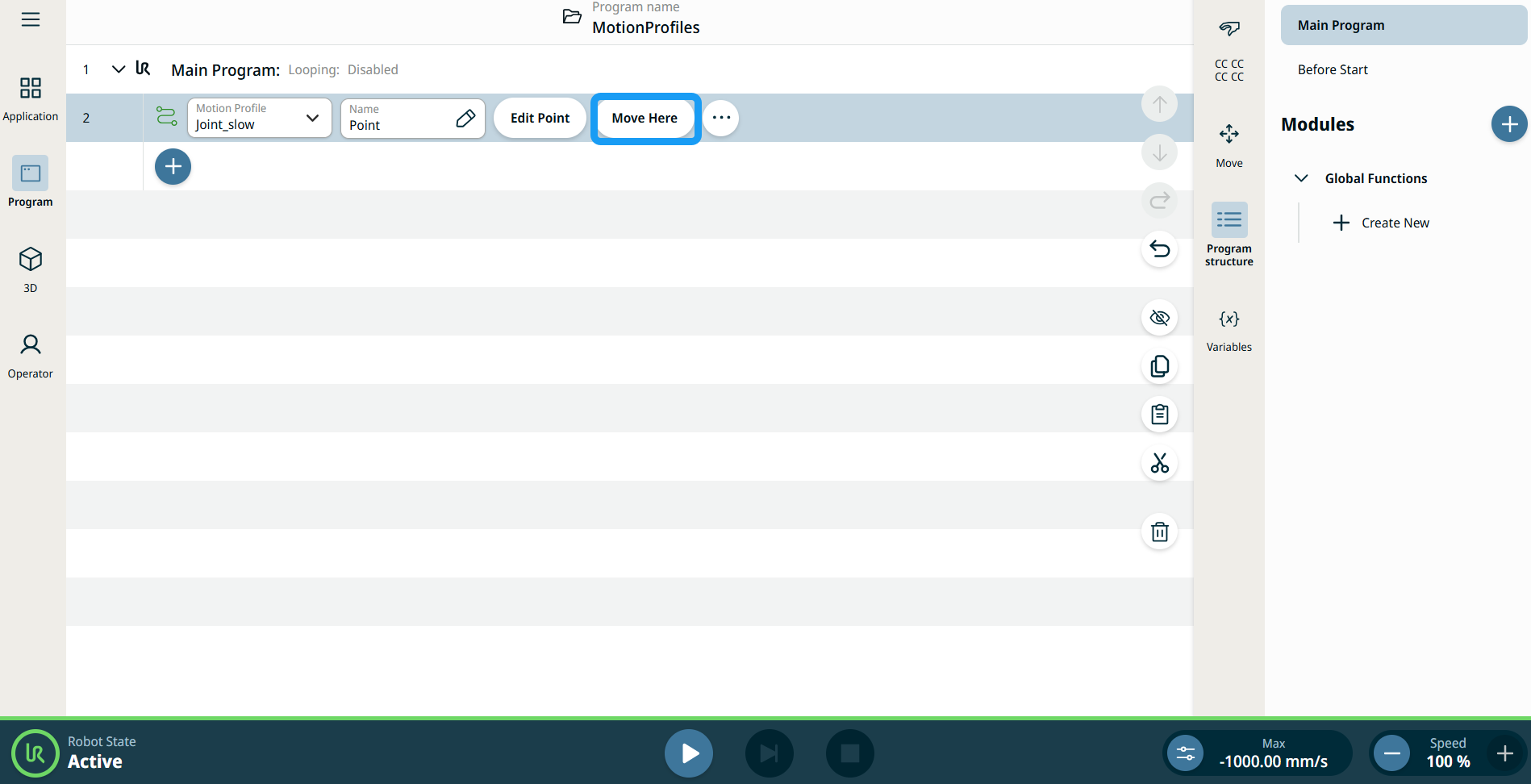
| Bruke Flytt hit-knappen |
Flytt hit-knappen er tilgjengelig i kommandoene Lineær bevegelse og Leddbevegelse. Denne funksjonen gjør det mulig å gå direkte til posisjonen til et vendepunkt fra programtreet. Å trykke på Flytt her-knappen åpner Flytt roboten til posisjon-dialogen. Knappen er synlig når vendepunktet er lært, og er kun aktivert når robotens status er i Normal eller Redusert modus.
|
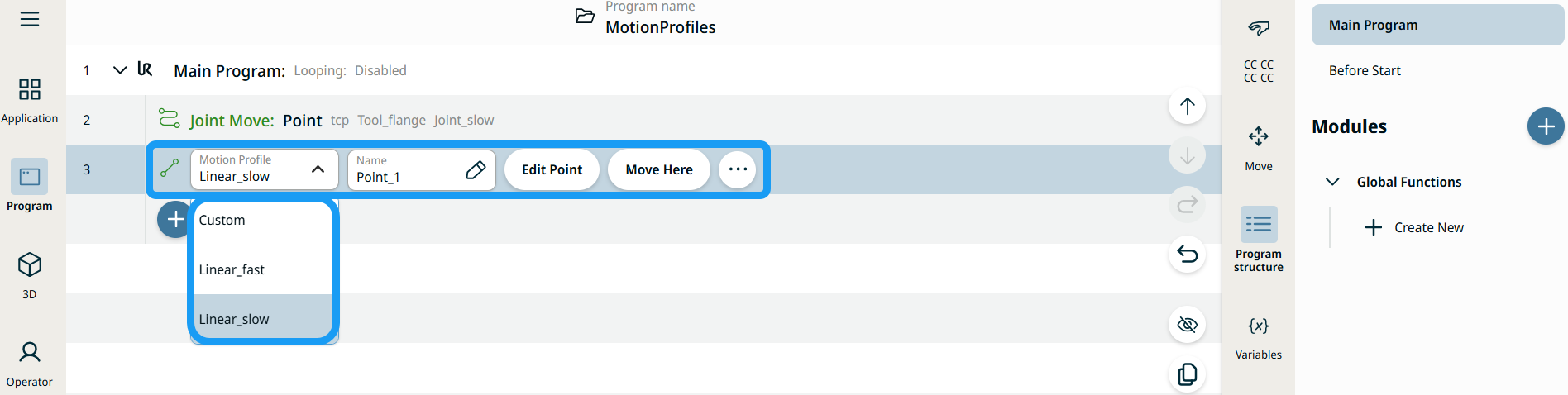
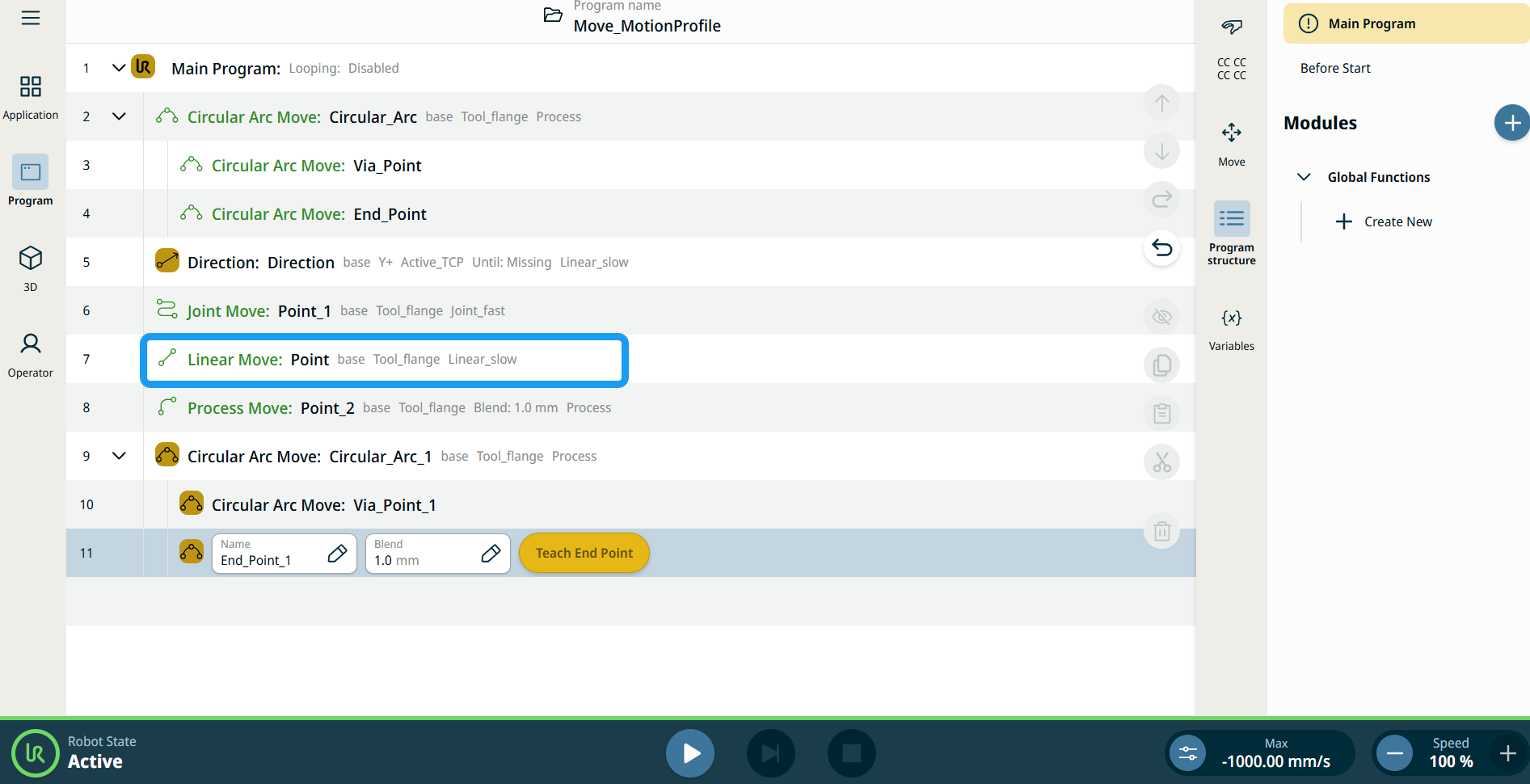
| Bevegelsesprofiletiketter på Flytt-noder |
Alle Flytt-relaterte kommandonoder i programtreet viser Bevegelsesprofilen knyttet til hver node. Denne funksjonen gjør det mulig for brukere å se den valgte Bevegelsesprofilen på en Flytt-node. Denne funksjonen er implementert på følgende kommandonoder: Flytt-noder med egendefinert bevegelsesprofil vil vise verdiene for hastighet og akselerasjon i stedet for Bevegelsesprofil. |
|
|
|
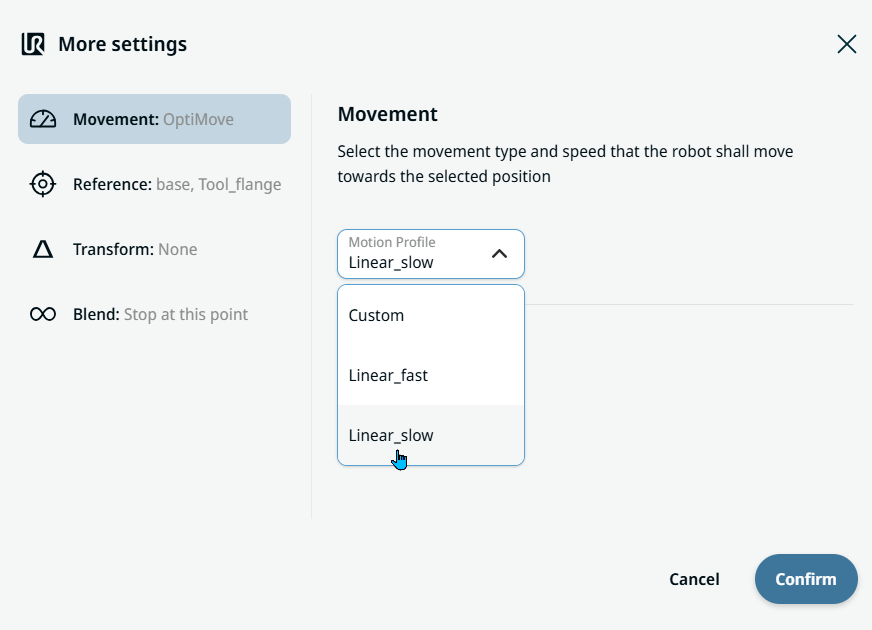
| Movement setting |
|
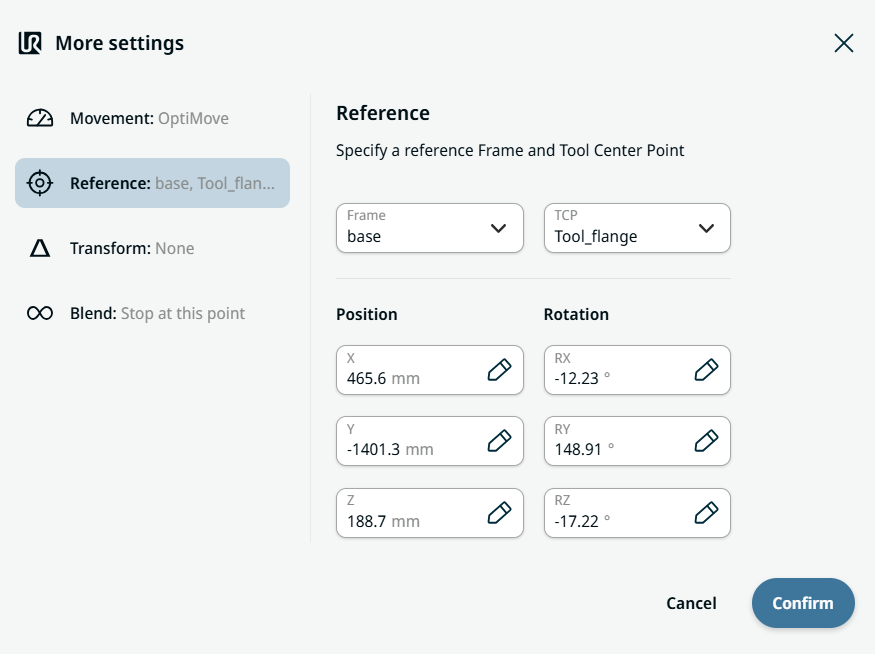
| Reference setting |
|
| Transform setting |
|
|
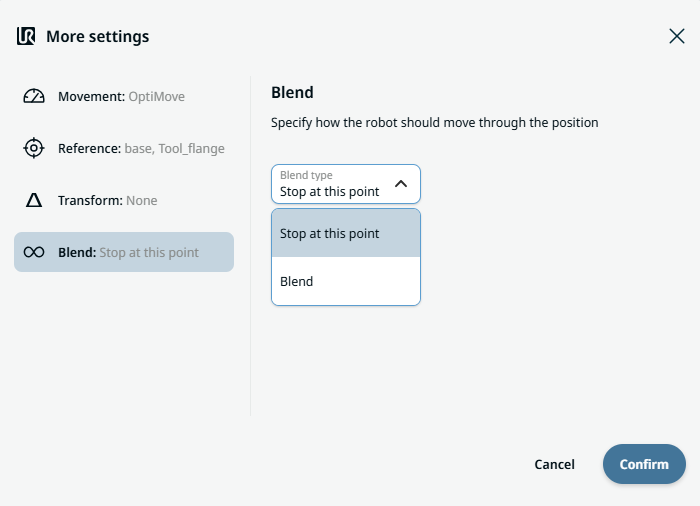
Blend setting |
|