조립
| 설명 |
베이스 장착형 케이블 연장 모듈, 40m, OEM Control Box 및 로봇 암을 조립하려면 다음을 참조하십시오. UR 표준 컨트롤러와 함께 40m 케이블을 사용하면 인증이 무효화되므로 함께 사용하지 마십시오. 다른 케이블 옵션을 사용하여 40m 케이블을 연장하지 마십시오. 조립하기 전에 케이블을 풉니다. 케이블의 한쪽 끝에 레이블이 있습니다. 이 끝은 케이블 연장 모듈 박스, CB 쪽에 연결됩니다. 용접 솔루션을 만드는 경우, 케이블 연장 모듈의 로봇 베이스 부분 하단을 용접 전류로부터 분리해야 합니다. |
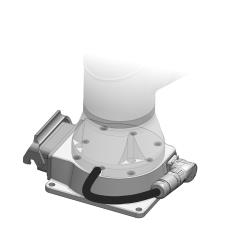
| 암 고정 |
로봇 암을 케이블 연장 모듈 박스인 로봇 베이스에 고정하기 위한 올바른 토크 값은 해당 로봇 사용자 설명서 내용을 참조하십시오. 로봇 장착에 사용 가능한 나사를 사용하십시오.
|
| 40m 메이팅. 케이블과 OEM Control Box |
|


| 40m 메이팅. 케이블과 로봇 암 |
|

| 조립 후 작업 |
조립이 완료되면, 몇 가지 추가 작업을 수행해야 로봇 조립 작업을 할 수 있습니다.
로봇 사용자 설명서의 다음 섹션을 검토하십시오.
|