안전한 집
| 설명 |
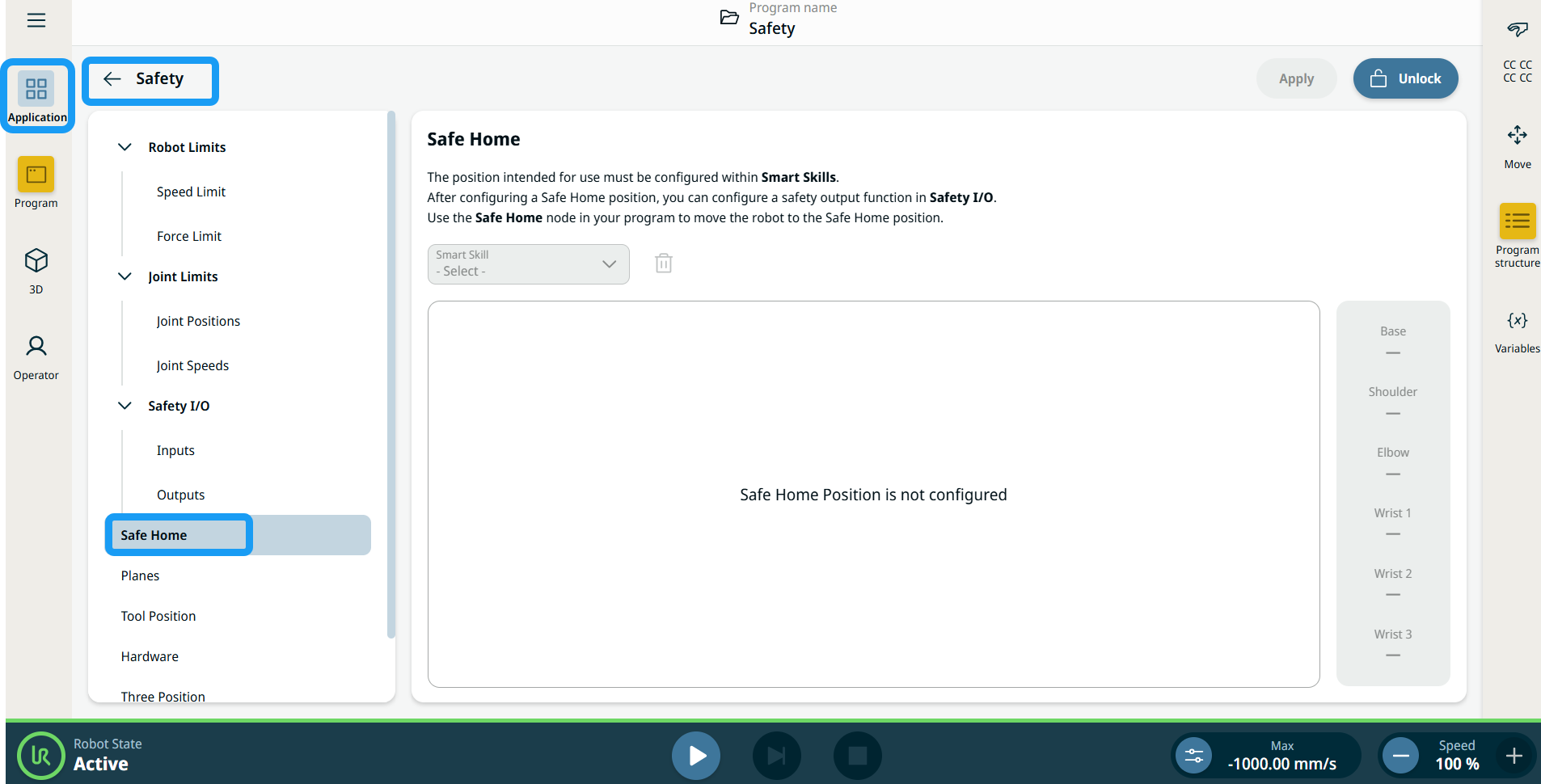
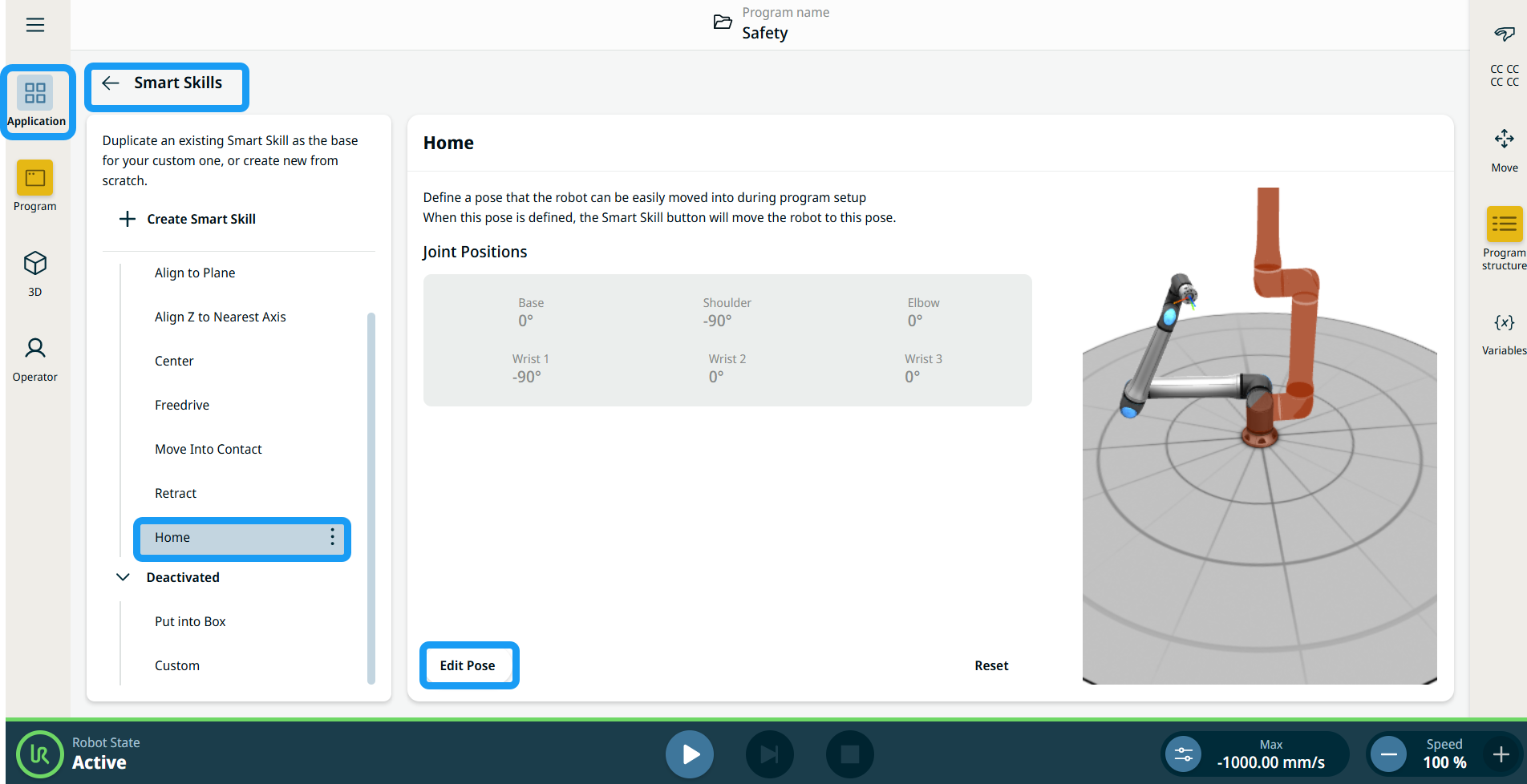
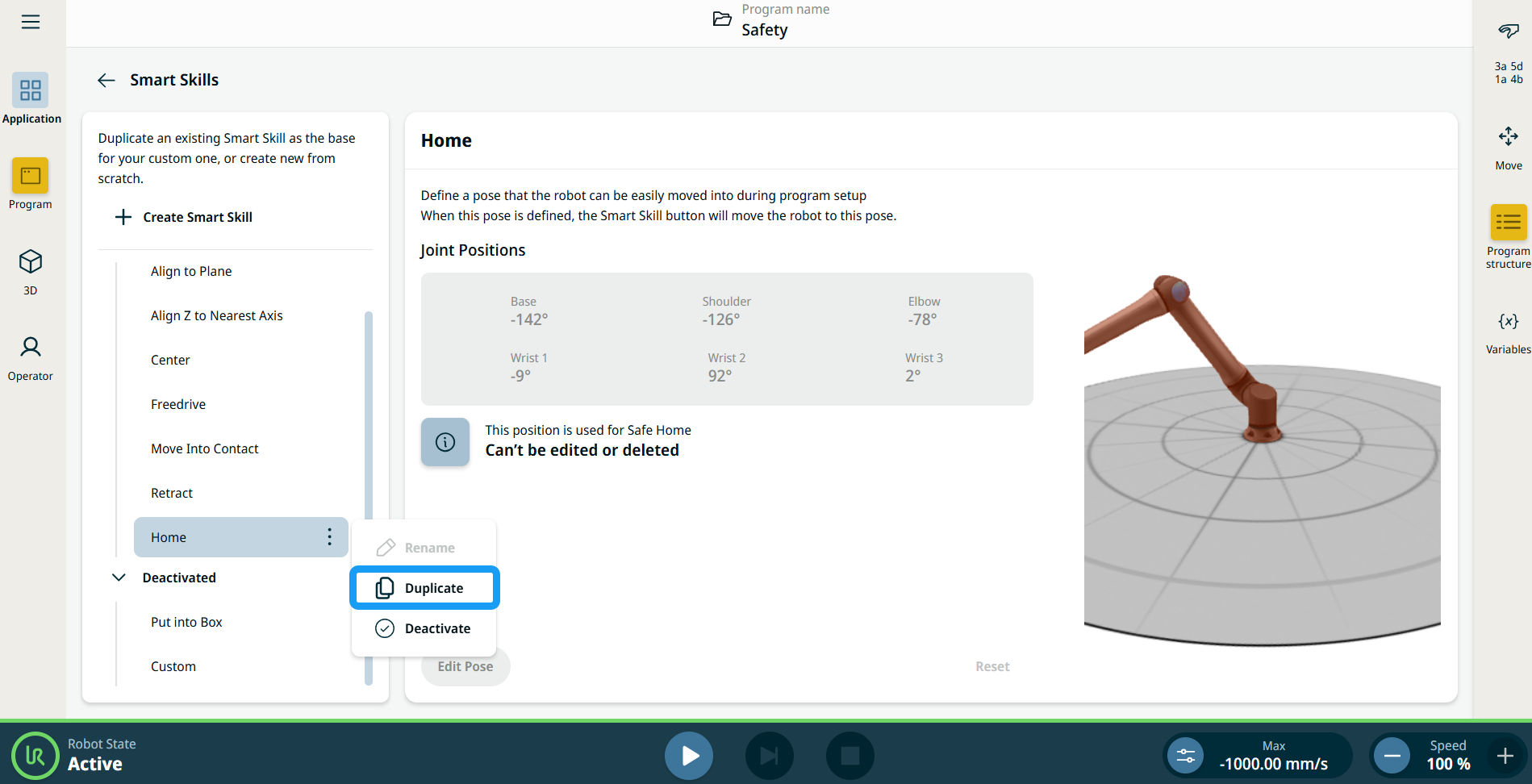
안전 홈은 구성된 안전 홈 위치에 로봇이 도달하는 경우 활성화되는 안전 관련 출력을 사용자가 정의할 수 있는 PolyScope X 기능입니다. 사용자는 사용 가능한 스마트 스킬 위치의 드롭다운 메뉴에서 홈을 선택하며, 이 위치를 안전 홈 위치의 참조로 할당할 수 있습니다.
|
|
안전 홈 액세스 |
|
|
|
|
|
|
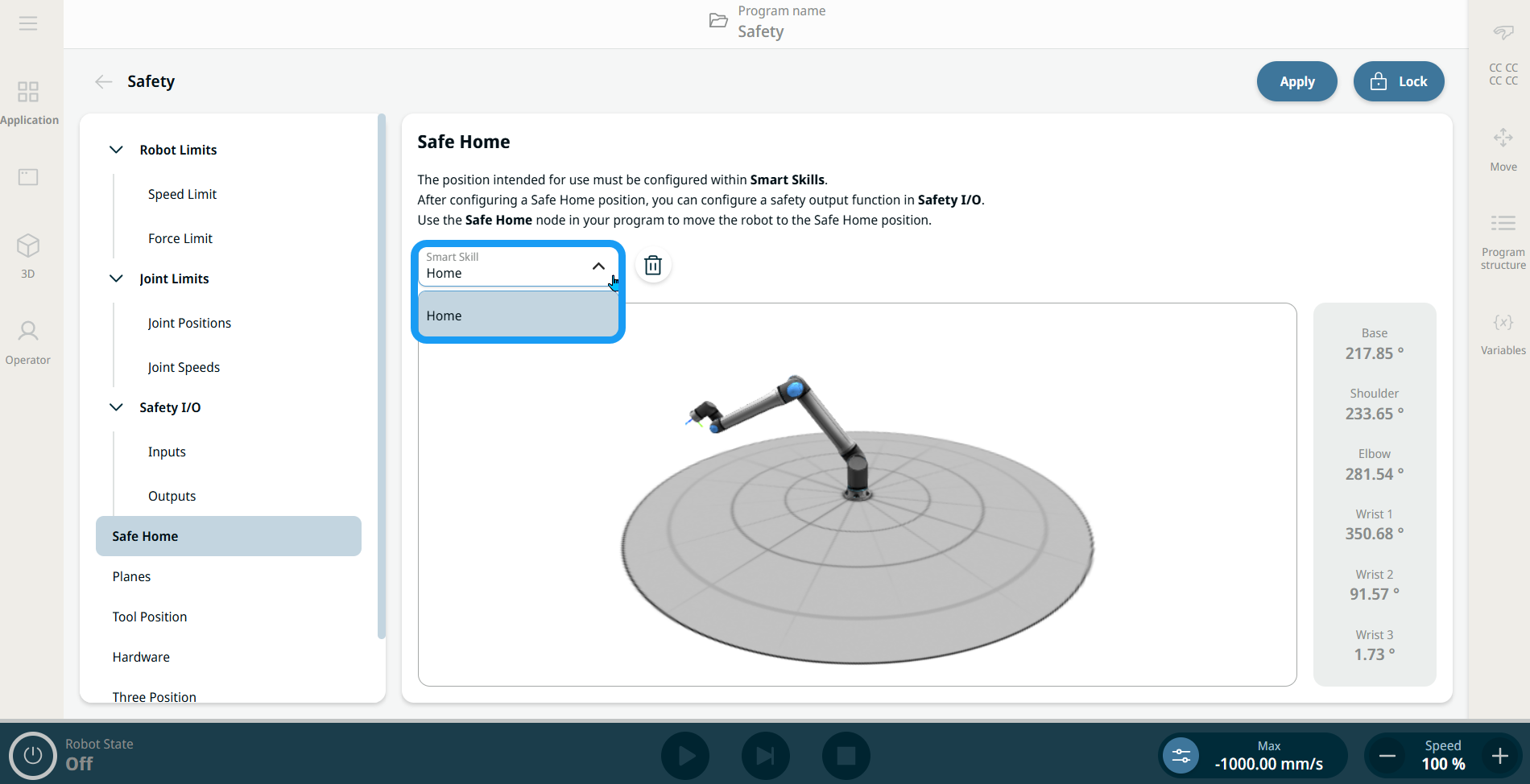
'Position Smart Skill'이 안전 홈에 대한 위치 참조로 선택된 경우:
|
|
출력의 안전 홈 기능 |
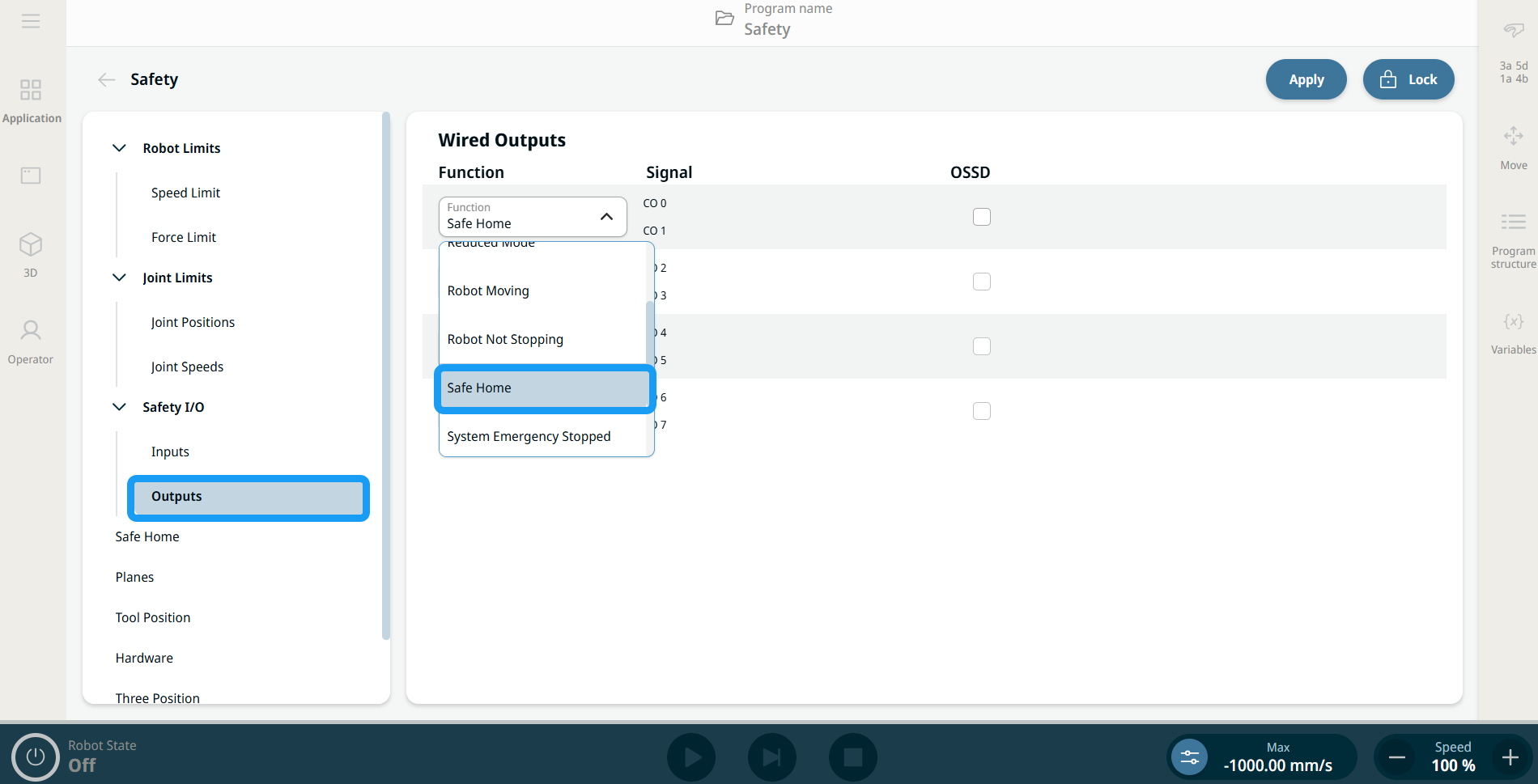
홈 위치가 안전의 위치 스마트 스킬에 할당되면, 안전 출력 기능 드롭다운에 안전 홈이 새로운 기능 할당으로 포함됩니다. 안전 I/O의 출력에 있는 기능 필드에서 안전 홈을 선택하십시오.
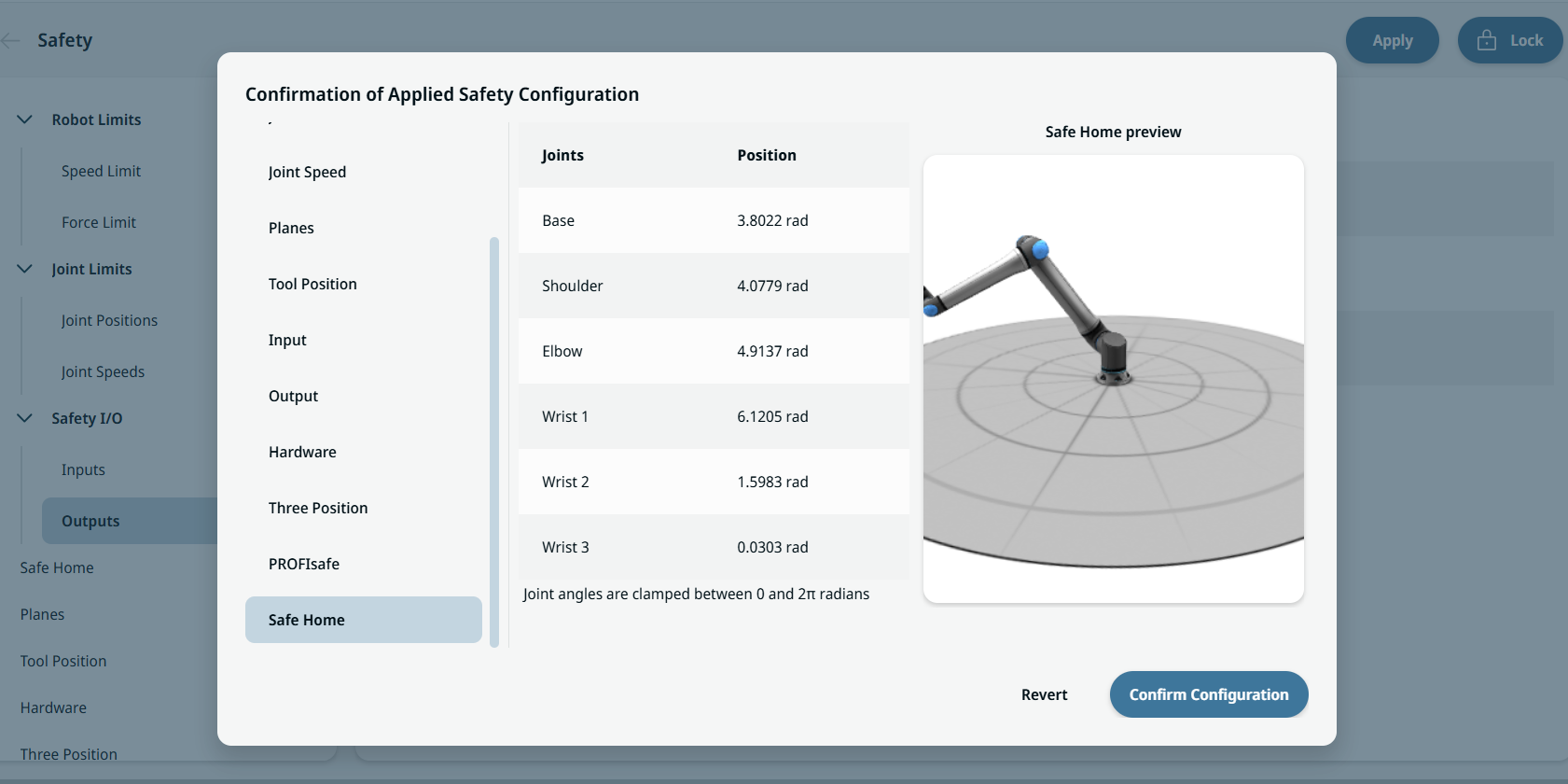
안전 홈은 적용된 안전 구성 확인 개요 대화 상자의 기능 할당 표에서 확인할 수 있습니다.
|
|
프로그램 노드로서의 안전 홈 |
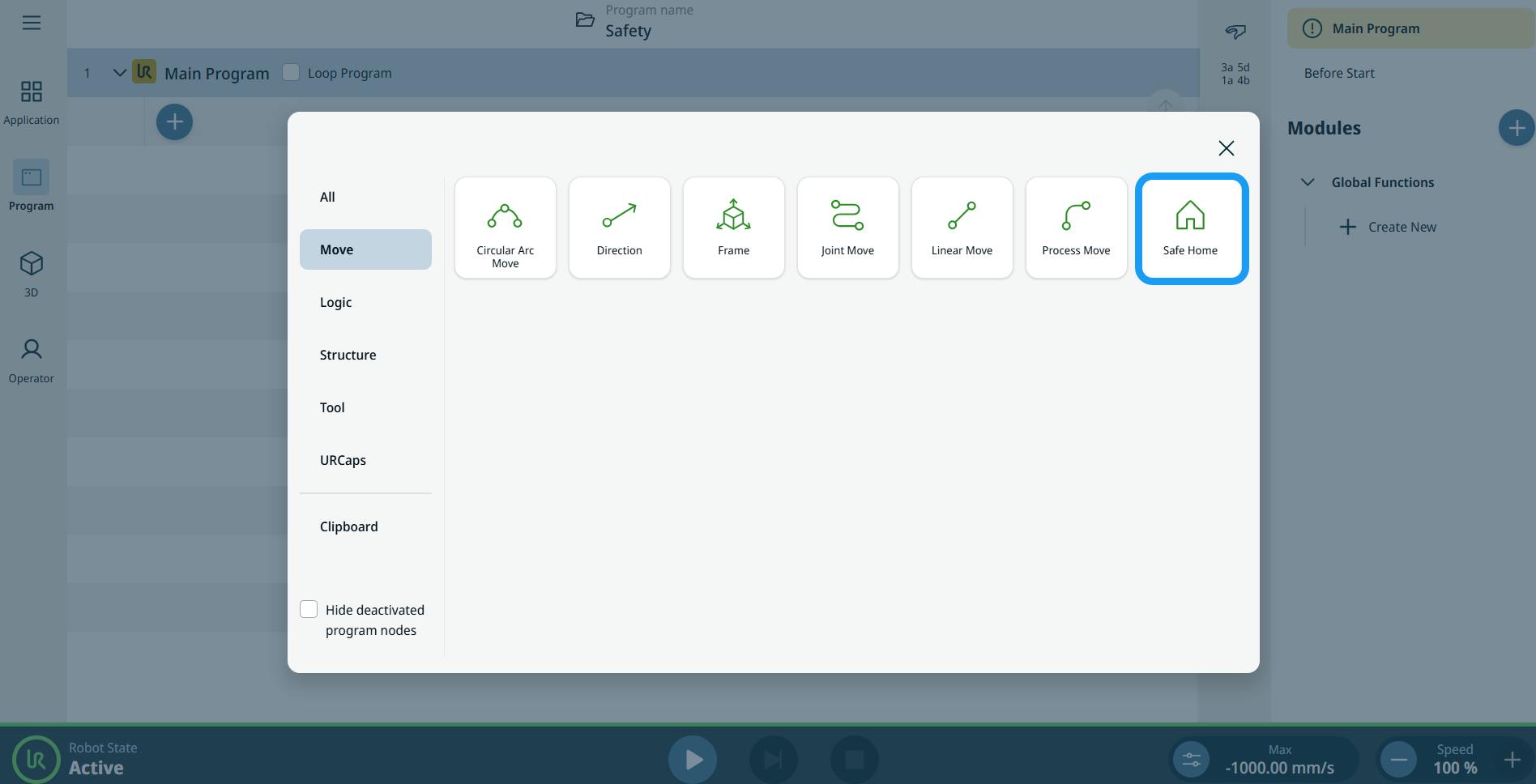
안전 홈 프로그램 노드는 명령 노드 내의 이동 노드 카테고리 아래에 있습니다. 안전 홈의 안전 애플리케이션 설정에서 구성된 대로, 사전 정의된 안전 홈 위치로 이동하도록 로봇에 명령하는 데 이 노드가 사용됩니다.
안전 설정에서 안전 홈 위치를 구성하지 않고 노드를 추가하면 해당 노드가 노란색으로 표시됩니다.

안전 홈 명령 노드에서는 점 세 개 아이콘
|
 을 탭하면 모션 프로필 옵션 및 기타 고급 설정이 제공됩니다.
을 탭하면 모션 프로필 옵션 및 기타 고급 설정이 제공됩니다.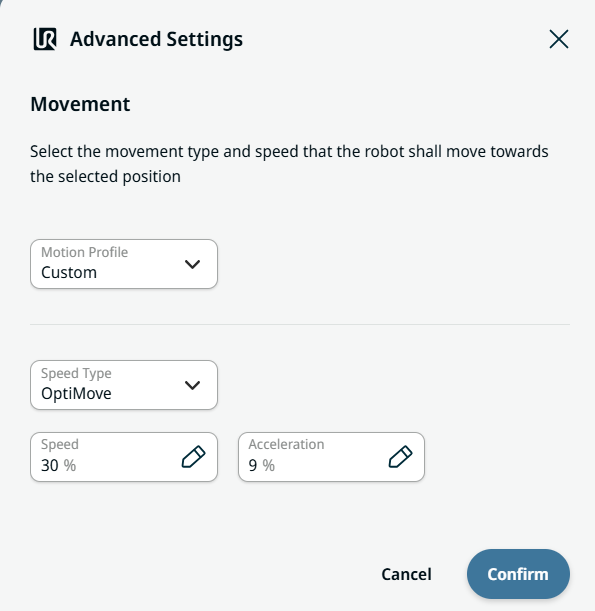
| 고급 설정 |
사용자는 고급 설정에서 두 개의 탭과 두 개의 필드를 사용하여 이동 프로필을 만들 수 있습니다.
모션 프로필은 사용자가 이동 노드(조인트 이동, 선형 이동, 원호 이동, 프로세스 이동 및 방향)에서 사전 정의된 모션 프로필을 설정할 수 있는 기능입니다. 커스텀 모션 프로필을 사용하면 사용자가 이동 노드에서 이동 데이터를 정의할 수 있습니다. 속도 유형 필드에서 OptiMove가 기본 옵션입니다. 속도와 가속도를 초당 각도(deg/s) 또는 초당 mm(mm/s) 단위로 입력하려면 ' ' 클래식 모드를 선택하십시오. OptiMove 설정은 사용 및 설정을 간소화하기 위해 퍼센트로 지정됩니다. 사용자는 속도 탭에서 선호 속도의 백분율을 구성할 수 있으며, 이렇게 하면 로봇의 최대 속도 기능 백분율로 목표 이동 속도가 설정됩니다. 사용자는 가속도 탭에서 선호 가속도의 백분율을 구성할 수 있으며, 이렇게 하면 로봇의 최대 파워 백분율로 가속 및 감속 시 목표 토크 제한이 설정됩니다.
|