デバイスの接続
3 ポジションイネーブルデバイスの接続
| 説明 |
OEM コントロールボックスを購入する際、3PE ティーチペンダントは付属していませんので、イネーブルデバイスの機能は提供されません。 UR20 または UR30 を使用する場合、ロボットアプリケーションの範囲内でプログラミングまたは教示を行うときに、外部イネーブルデバイスまたは 3PE ティーチペンダントが必要です。 |
|
OEM Control Box は、次のイネーブルデバイス構成を安全にサポートします。
標準ティーチペンダントは、UR20 および UR30 ロボットではサポートされていません。
|
|
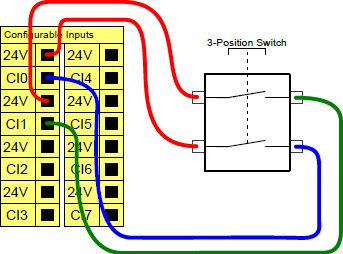
以下の図は、3 ポジションイネーブルデバイスの接続方法を示します。
注意:3 ポジションイネーブルデバイス入力用の 2 個の入力チャンネルには、1 秒の許容差があります。
|
|
UR シリーズロボットへのイネーブルデバイスの接続方法 |
または
|
|
電気的構成に関する詳細情報については、 myur.universal-robots.com/manuals からダウンロードできる UR ユーザーマニュアルの「電気的インターフェース」を参照してください。
|
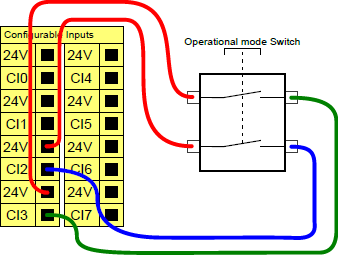
運用モードスイッチの接続方法
| 説明 |
3 ポジションイネーブルデバイスを使用するには、運用モードのスイッチを使用する必要があります。
|
|
3 ポジションイネーブルデバイスを使用するには、運用モードのスイッチを使用する必要があります。 以下の図は運用モードスイッチの接続方法を示します。
|