OptiMove
| 説明 |
のOptiMove モーション値は、PolyScope X のJointおよびLinear Move コマンドの高度な機能です。 ジョイント移動 および 直線移動 を参照してください。
OptiMove を使用すると、次のようなメリットが得られます:
とOptiMove を組み合わせることで、一般的にサイクルタイムが短縮され、より滑らかな動作が実現し、ロボットへの負荷が軽減されます。
|
|
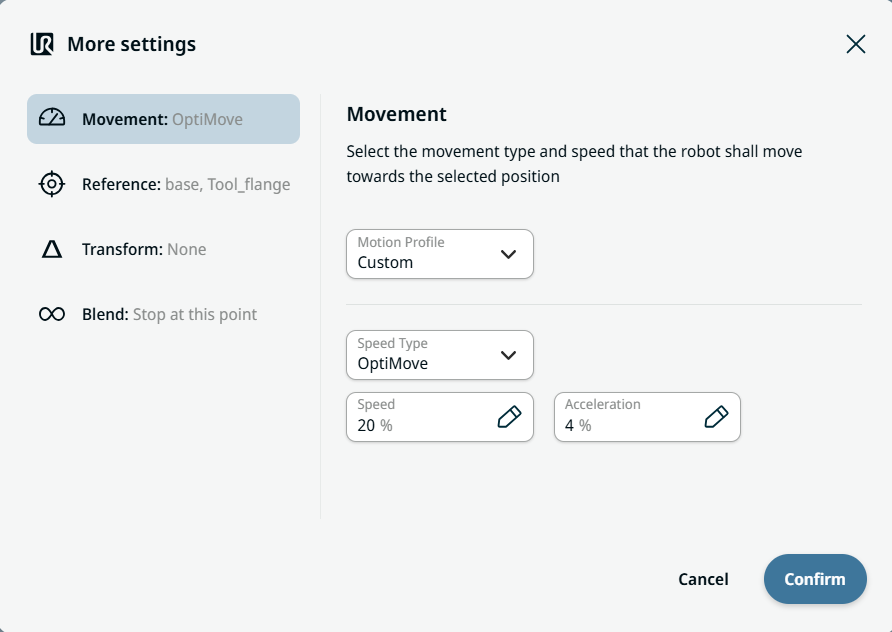
OptiMoveにアクセスするには |
|
|
|
|
|
|
|

 )があります。
)があります。