ロボット限界
| 説明 |
ロボット限界は、ロボットの運動全般を制限します。
安全限界は、ツールフランジおよびユーザー定義された 2 つのツール位置の中心におけるフォースと動作を制限します
|
| 速度制限 | 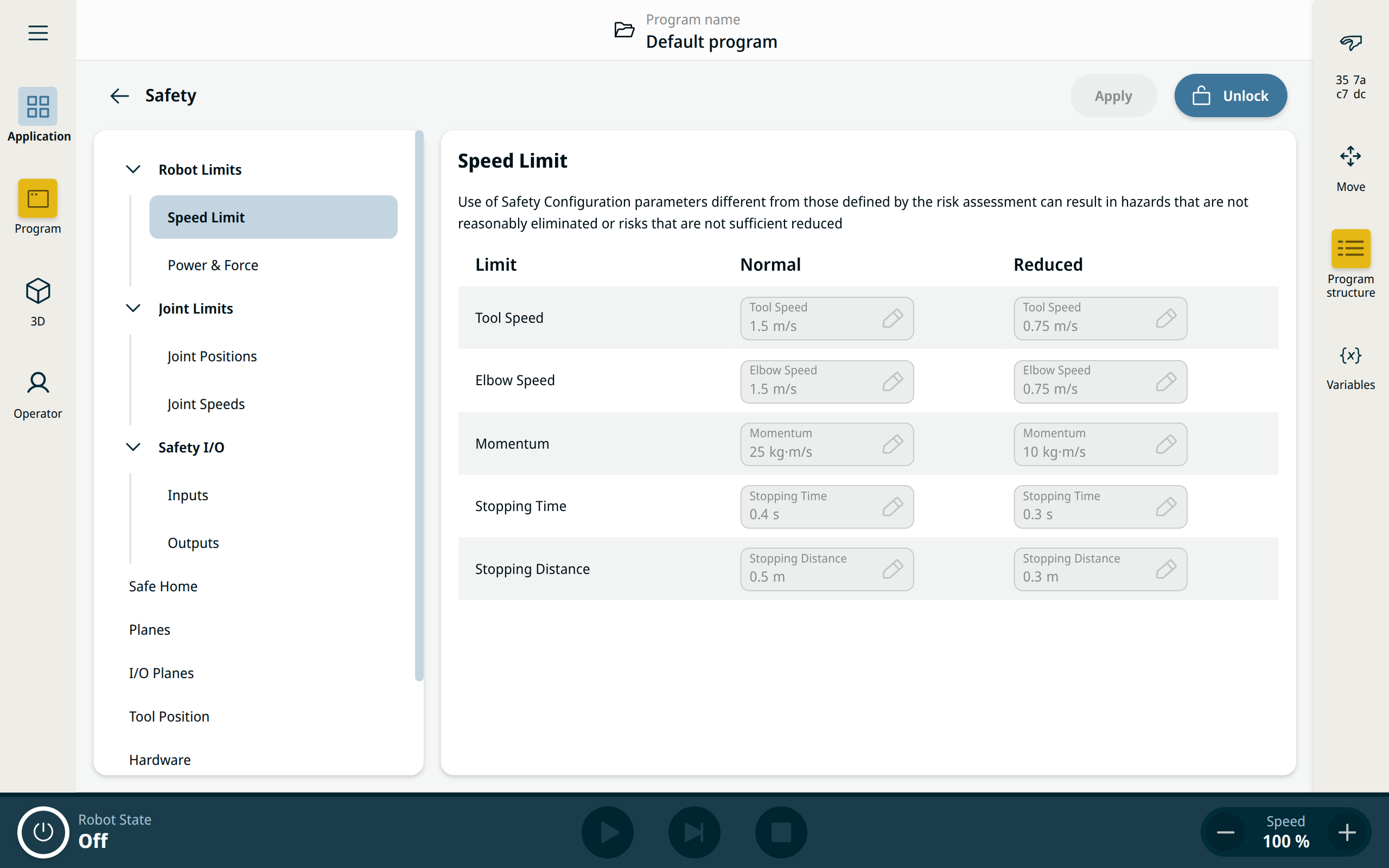
停止時間と距離を制限すると、ロボット全体の速度に影響します。 たとえば、停止時間を300ミリ秒に設定すると、最大ロボット速度が制限され、ロボットは300ミリ秒以内に停止することができます。
|
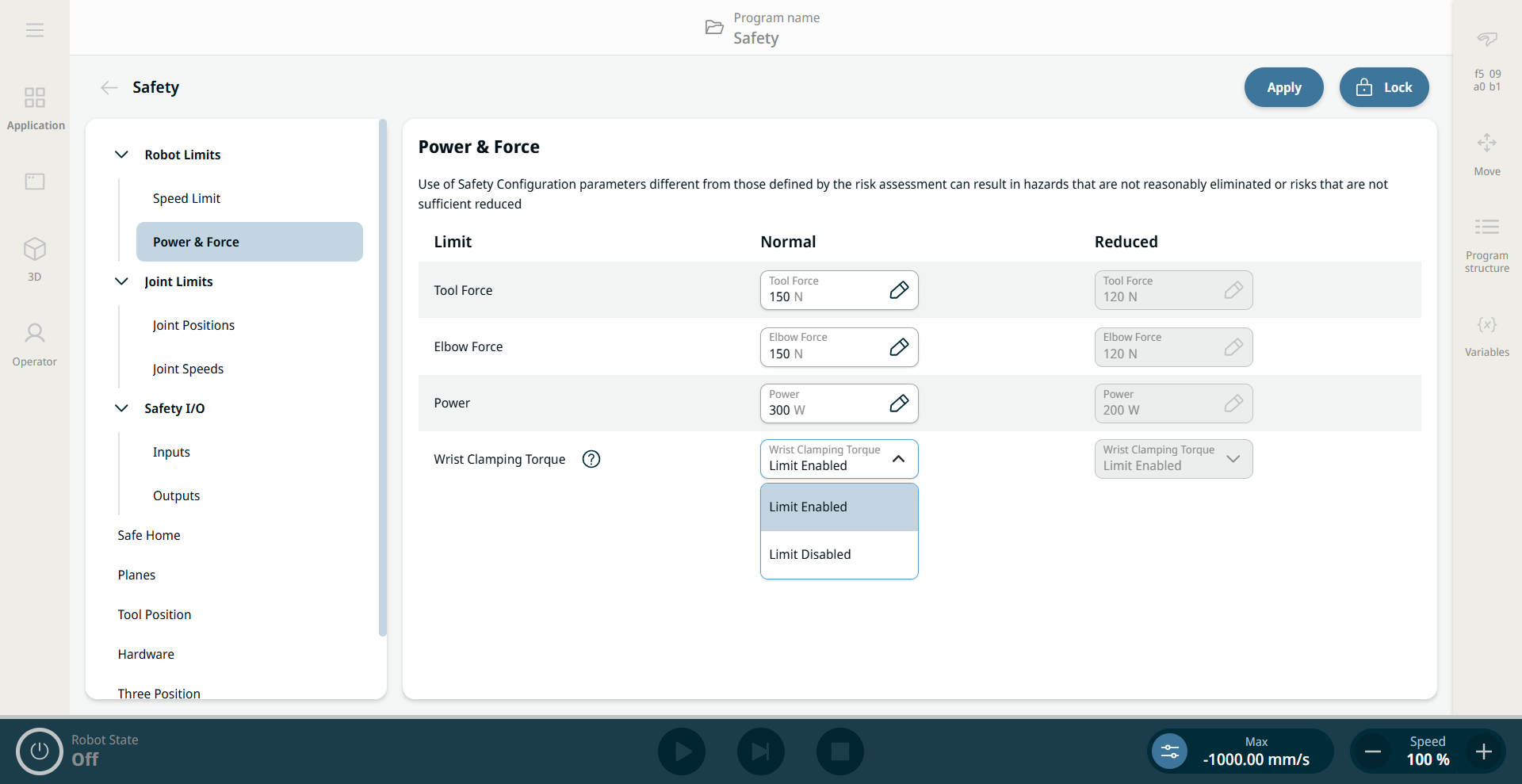
| パワーとフォース |
「リストの挟み込みトルク」安全機能が無効な場合、3 つのリストジョイントによってツールおよびエルボーのフォース限界が超過する可能性があります
|
| 安全モード |
保護停止が有効になっていない場合、安全システムは一連の安全制限に関連付けられた安全モードで動作します:
|