リストの挟み込みトルク限界
| 説明 |
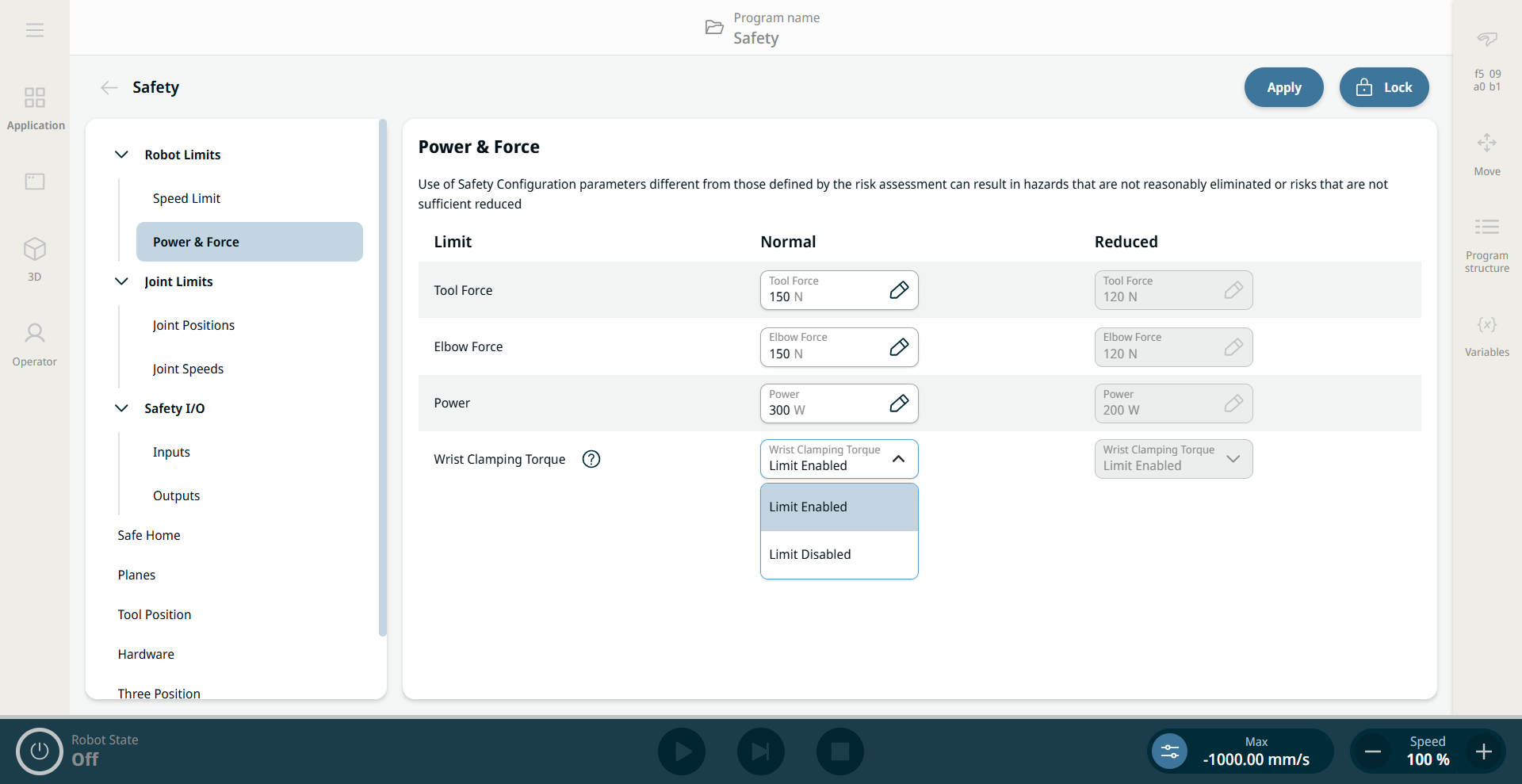
リスト挟み込みトルク限界 は、ロボットのリストジョイントの最大挟み込みトルクの限界を有効または無効にする設定です。 この制限はデフォルトで有効になっています。 この安全機能は、リストが押し付け動作で加えられるトルクの量を制限します。
|
|
リスト挟み込みトルク限界の詳細 |
有効 にすると、ロボットはリストジョイントのトルクを制限し、リスト、荷重、ロボットの下部アーム間の挟み込みを防ぎます。 この設定を有効にすると、ベース、ショルダー、およびエルボージョイントの適用トルクウィンドウの上限(安全適合なし)も定義されます。 フォース制御アプリケーションでは、達成可能な接触力は、安全機能 ツールフォース限界 および エルボーフォース限界 で指定された力よりも大幅に低くなる場合があります。
無効にすると、ロボットは力制御アプリケーションなどで、リストジョイントでより高い押し付け力をかけることができます。 無効の場合、リスト、荷重、およびロボットの下部アームの間での挟み込みリスクは、他の手段で軽減する必要があります。 この安全機能は、デフォルトではすべてのロボットで有効になっています。 PolyScope X バージョン 10.12 以降では、この安全機能を無効化できます。
|
|
リスト挟み込みトルク限界の有効化と無効化 |
|