安全面
| 説明 |
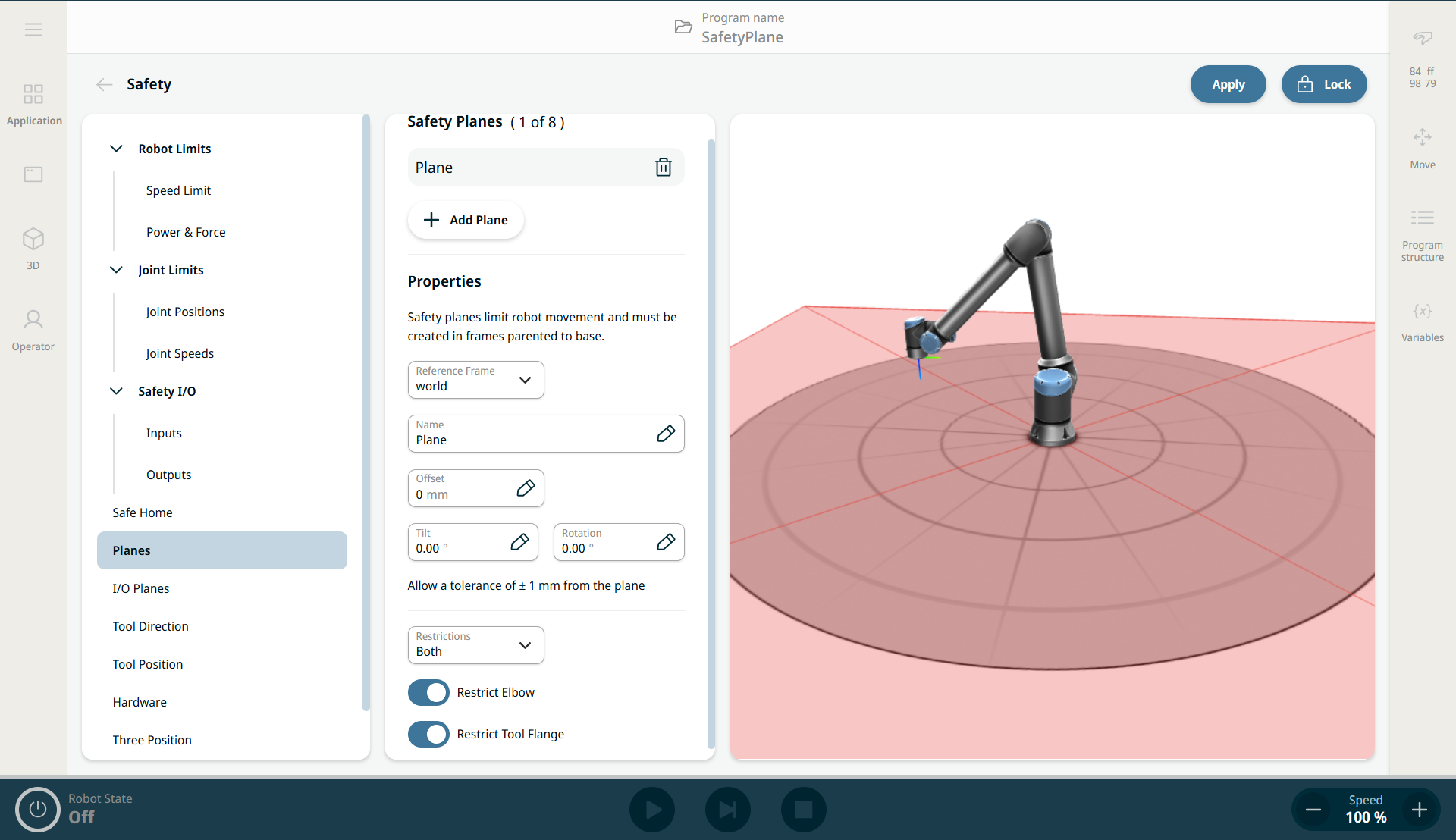
安全平面は、ロボットの作業空間、ツール、およびエルボーを制限します。 安全面を定義すると、定義されたツールスフィアとエルボのみが制限され、ロボットアームの全体的な制限は制限されません。 安全平面を定義しても、ロボットアームの他の部分がこの限界に従う保証はありません。 |
| 安全平面の設定 |
以下に記載されているプロパティを使用して安全平面を設定できます。
以下に記載されている限界を使用して各平面を設定できます。
|
| エルボージョイントの制限 |
この機能は、デフォルトで有効になっています。 [エルボー制限] を使用すると、ロボットのエルボージョイントが定義済みのいずれかの平面を通過するのを防止できます。 エルボが飛行機を通過するためのリストリクトエルボを無効にします。
|
| ツールフランジの制限 |
ツールフランジを制限すると、ツールフランジと取り付けられたツールが安全平面を横切ることが防止されます。 ツールフランジを制限するとき、制限されていない領域は、ツールフランジが正常に動作できる安全平面の内側の領域となります。 ツールフランジは安全平面の外にある制限された領域を横断できません。 制限を解除すると、ツールフランジが安全平面を超えて制限領域に移動できるようになりますが、取り付けられたツールは安全平面の内側に留まります。 大きなツールオフセットを使用する場合は、ツールフランジの制限を解除できます。 これにより、ツールの移動距離が長くなります。 ツールフランジを制限するには、平面フィーチャーを作成する必要があります。 平面フィーチャーは、後で安全設定で安全平面を設定するために使用されます。
|