フレームを使用した安全プレーン
| 説明 |
既存のフレームを使用して安全平面を定義できる。 これにより、あらかじめ定義された位置と回転(X、Y、Z、RX、RY、RZ)から平面パラメータを指定する、より直感的な方法が提供されます。 フレームのコピー ドロップダウンメニューからフレームを選択してください。
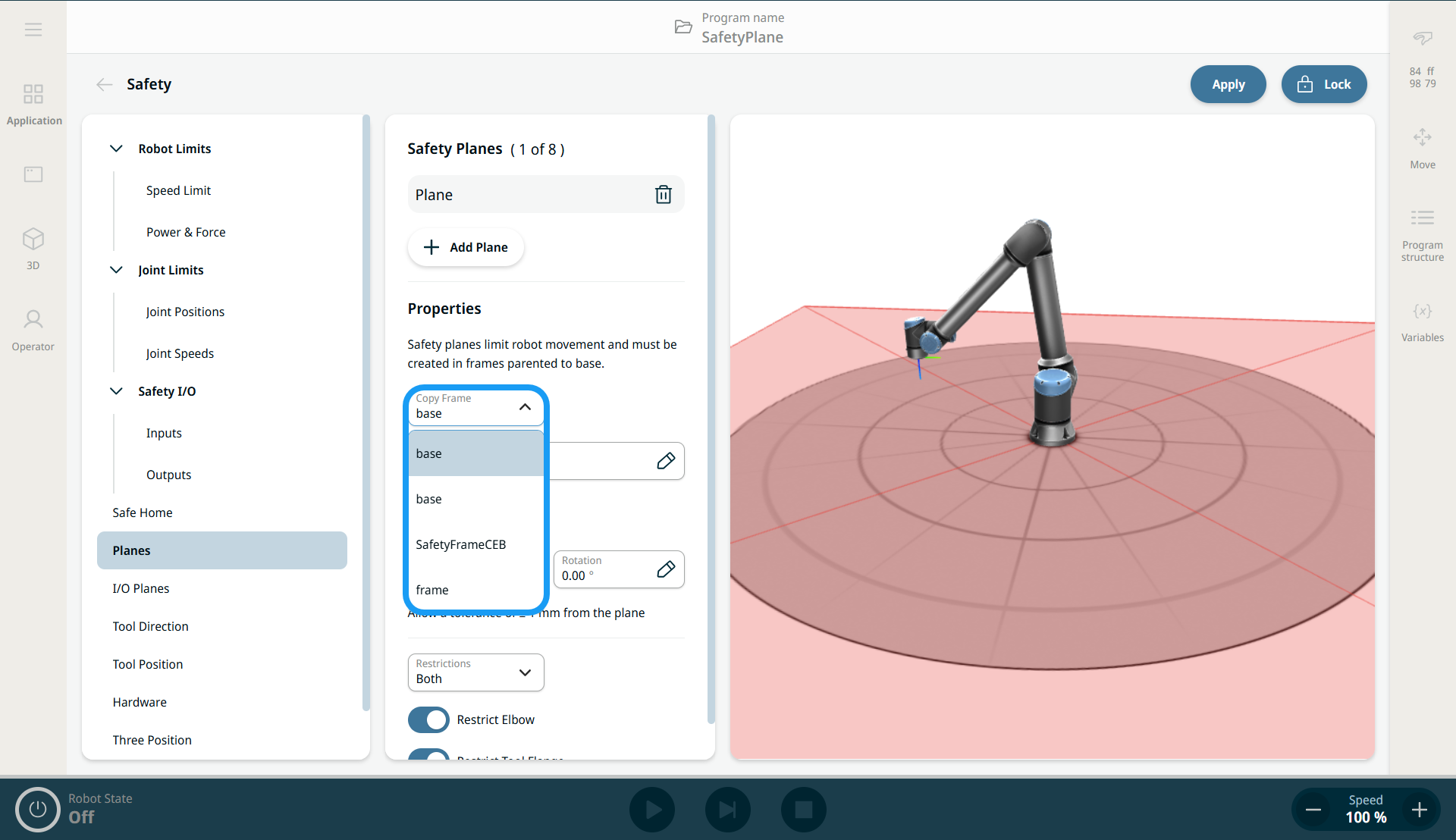
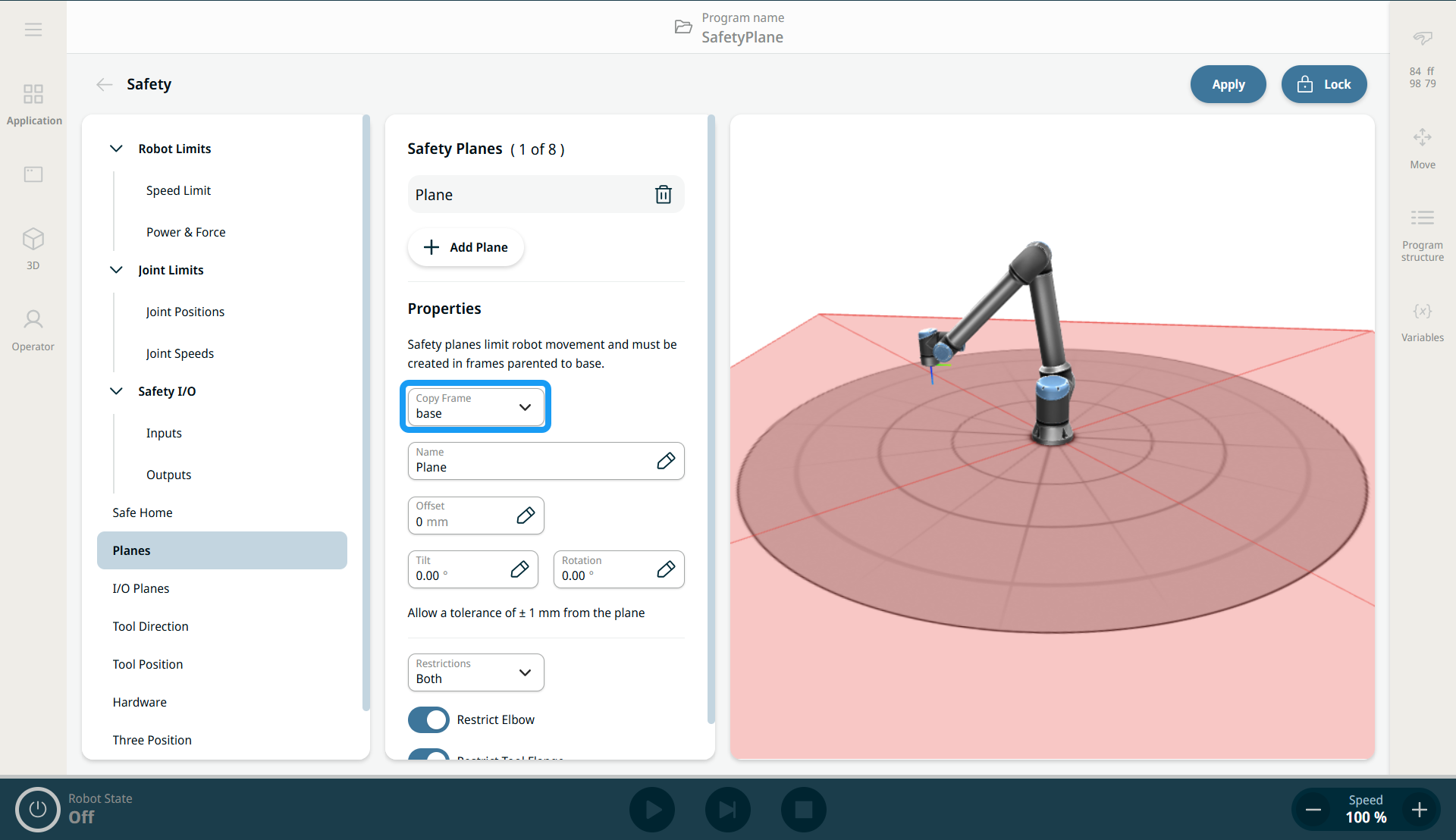
フレームのコピー ドロップダウンメニューは、 プレーン 画面の安全プレーン定義のパラメータ内にあります。 このリストには、Frames画面で定義されたフレームが含まれる。 フレームを選択すると、そのフレームが安全平面定義として使用される。 オフセット、傾斜、回転のパラメータを指定すると、それらは選択されたフレームに適用されます(「安全面の設定」を参照)。 結果として得られる安全平面は、すべてのパラメータを統合したものです。
|
|
|
『ソフトウェア・ハンドブック』の「フレーム」のセクションを参照してください。 |
|
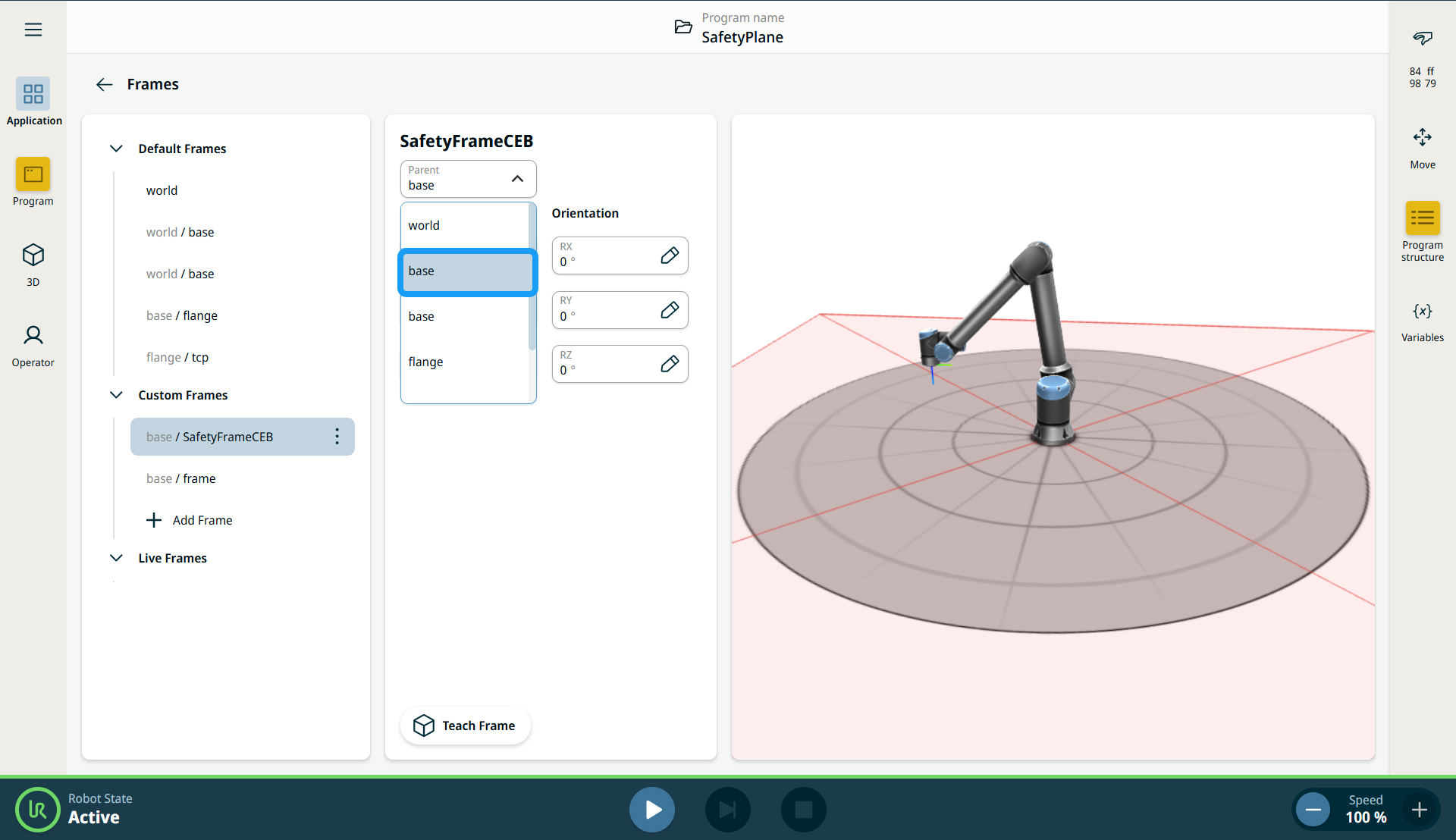
フレームを作成する |
|
|
|
安全平面で基準フレームを選択する |
|
|
|
|
|
|
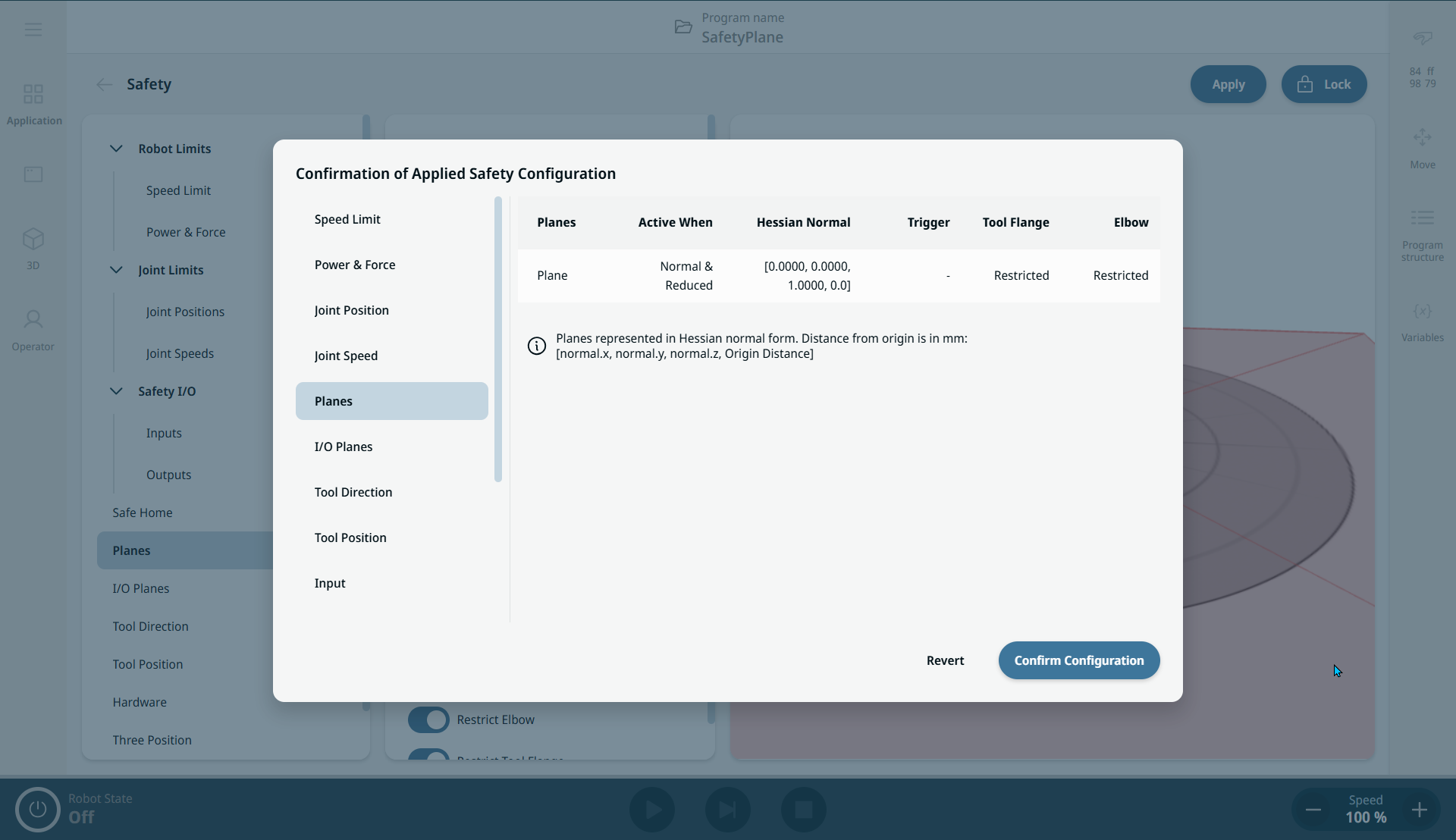
安全平面に使用されるフレームは、予想とは逆向きになっている場合があります。 ロボットが平面の違反側に位置している場合は、180度の傾きを追加してください。 平面構成の制限、エルボー関節の制限、およびツールフランジの制限については、「安全平面」を参照してください。
|