ツール位置の制限
| 説明 |
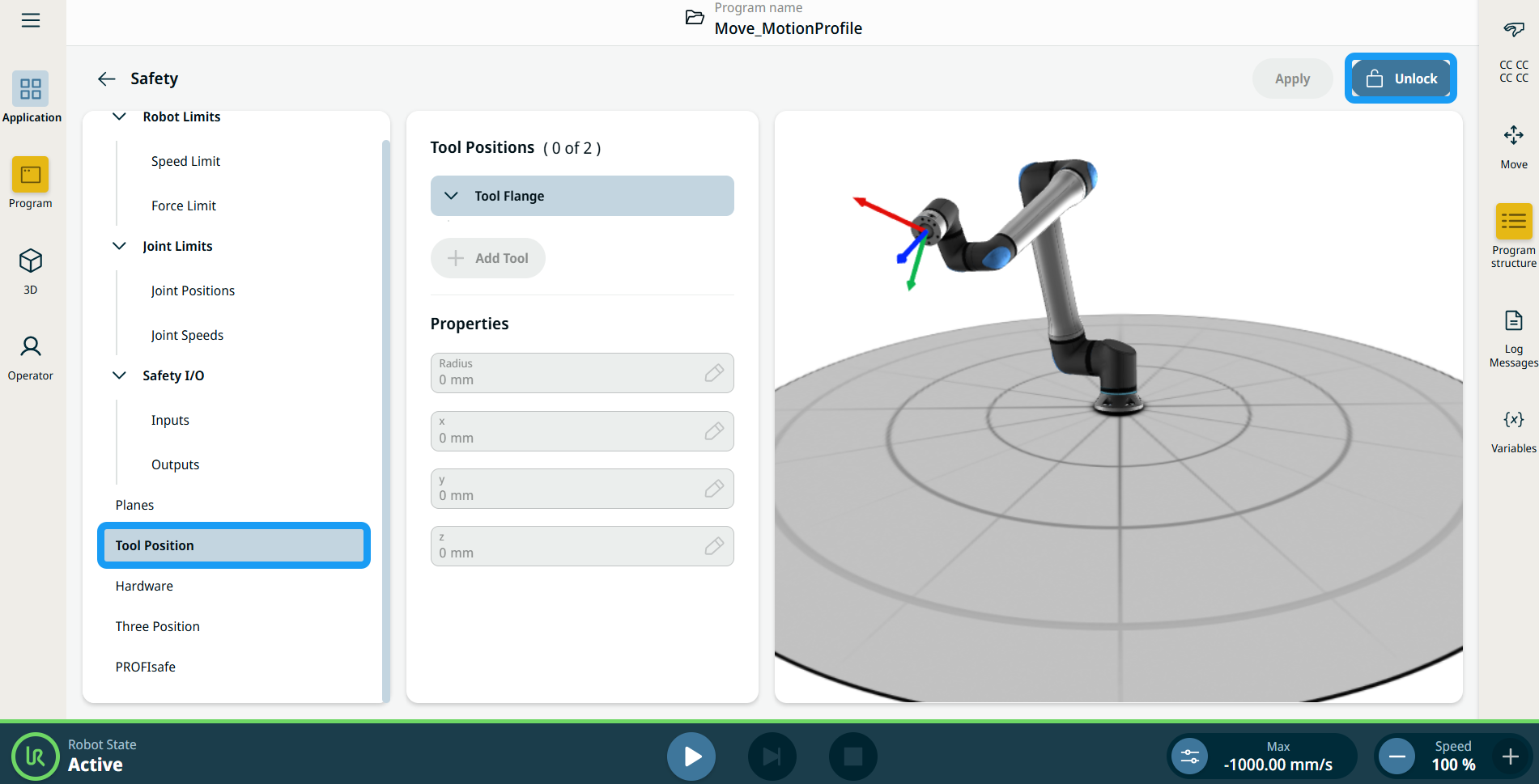
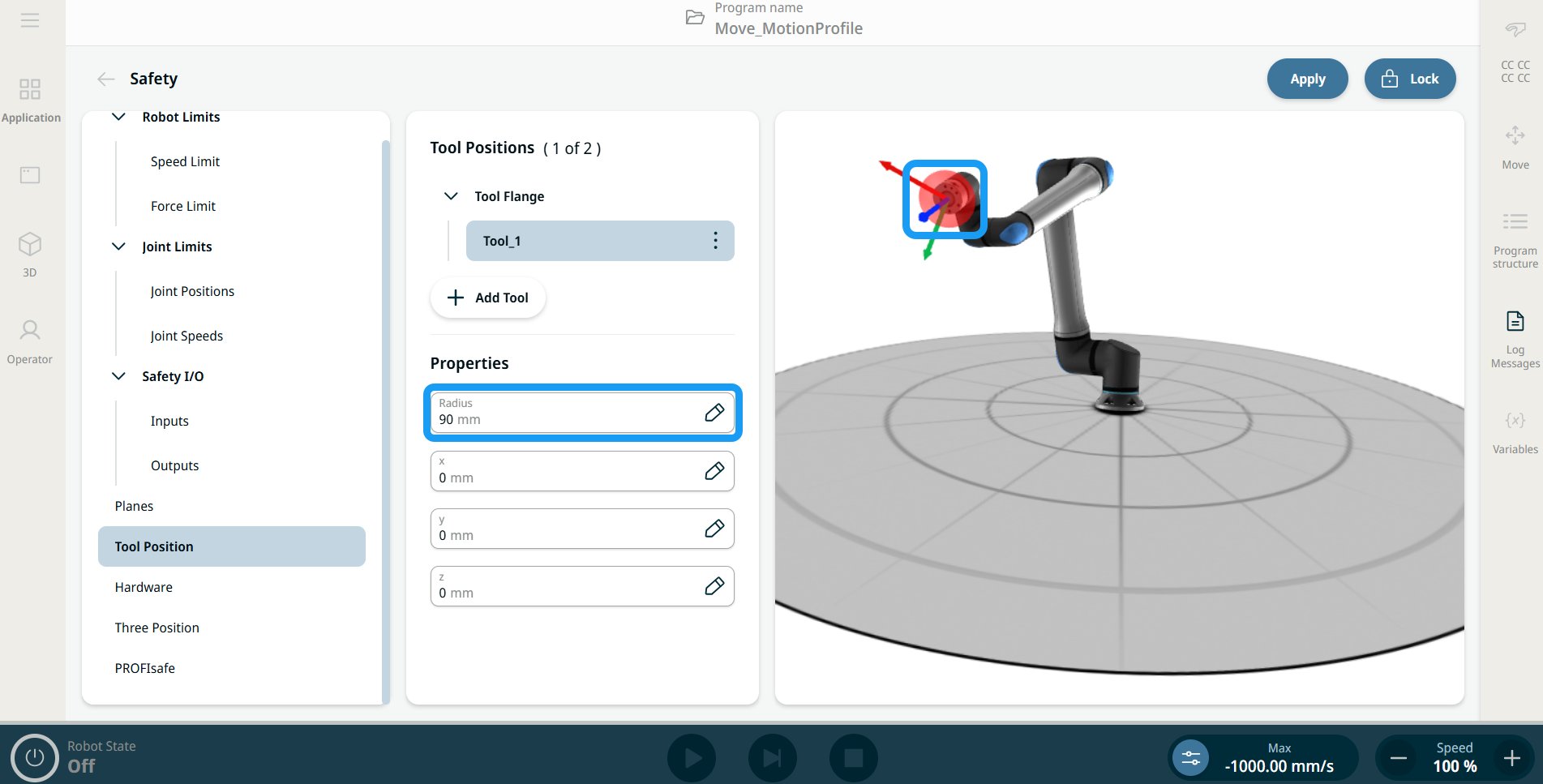
[ツール位置]画面では、半径を持つツール位置を定義することで、ロボットアーム端のツールやアクセサリーをより厳密に制限できます。このツール位置と安全平面が接触した場合に衝突を検出するか、ツールが平面に入った場合に減少モードに移行させることで、相互作用を設定します。
|
| 詳細 |
ツール位置には、主に 2 つの利点があります。
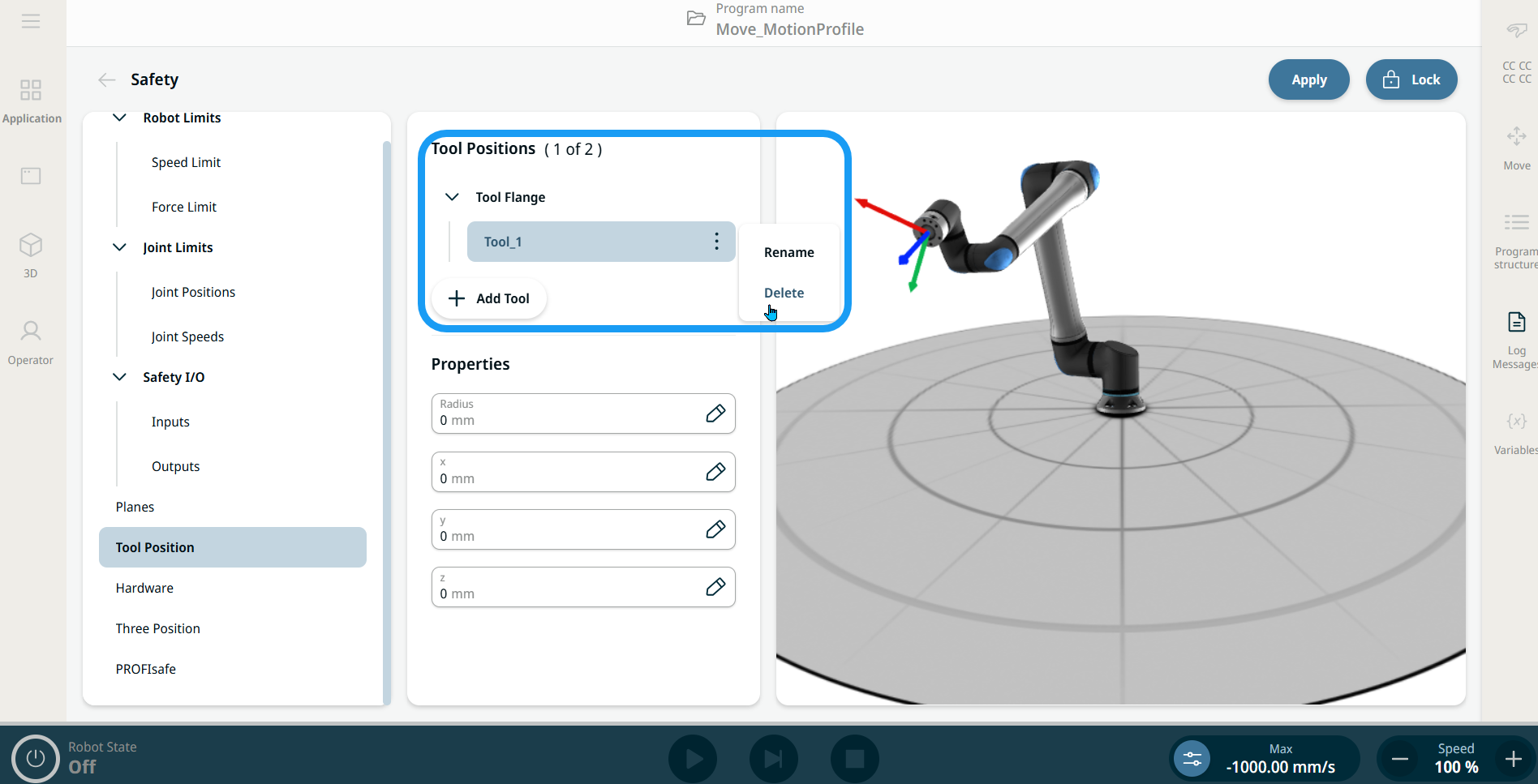
最大 2 つのツール位置を定義、設定、管理できます。
|
| ユーザー定義のツール |
ユーザー定義のツールでは、ユーザーは次のように変更できます。
|
|
ツール位置へのアクセス方法 |
|
|
|
|
|
|
|