PROFIsafe
| 説明 |
PROFIsafe ネットワークプロトコル(バージョン2.6.1として実装)により、ロボットはISO 13849のカテゴリー3、PLd要件に準拠して安全PLCと通信することができます。 ロボットは、安全関連情報を安全用PLCに送信し、安全関連情報を受信します。 安全に関連する通信には、ステータスメッセージや、安全機能(例:出力低減、停止)の起動が含まれます。 停止コマンドはIEC 60204-1に基づいて説明されており、非常停止はカテゴリー1の停止、安全装置による停止はカテゴリー2の停止に分類されます。
PROFIsafeインターフェースは、ロボット制御ボックスの安全IOピンにワイヤを接続するための安全なネットワークベースの代替手段を提供します。 PROFIsafeインターフェースを使用することで、URロボットの機能安全仕様(PL、カテゴリー、およびPFH)が維持されます。 詳細については、URマニュアルの「安全機能一覧」のセクションを参照してください。 例えば、「セーフガードストップ」はPLdカテゴリー3であり、PFH値は1.8E-07(1.8×10⁻⁷)未満です。
PROFIsafeは、有効なライセンスを持っているロボットでのみ利用できます。これは、最寄りの営業担当者に連絡することで入手できます。 ライセンスを取得した後、myUR からダウンロードしてください。 ロボットの登録およびライセンスの有効化に関する情報は、「ロボットの登録とURCapライセンスファイル」をご参照ください。
|
| 安全 PLC 入力 |
ロボットが安全 PLC に送信するステータスメッセージには、次の表に示す情報が含まれています。
|
||||||||||||||||
|
|
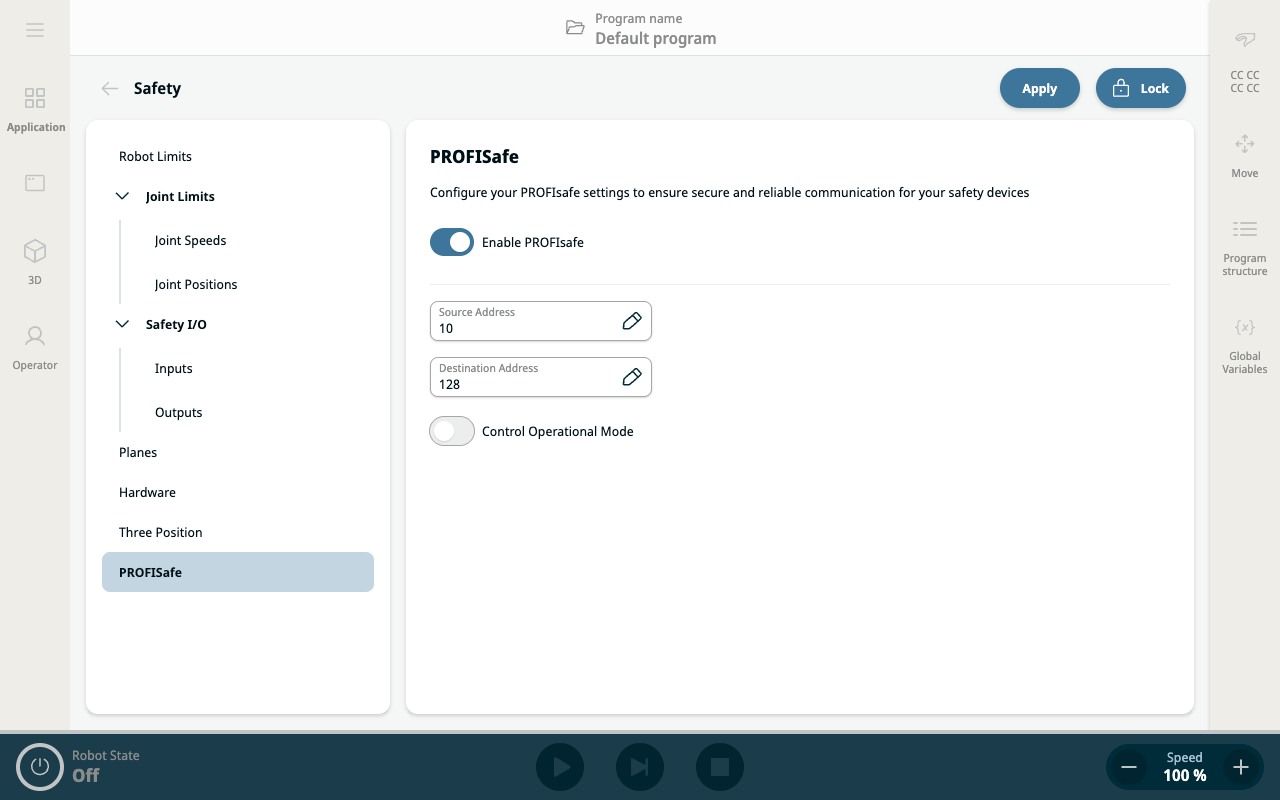
| PROFIsafeの設定 |
|
|
|
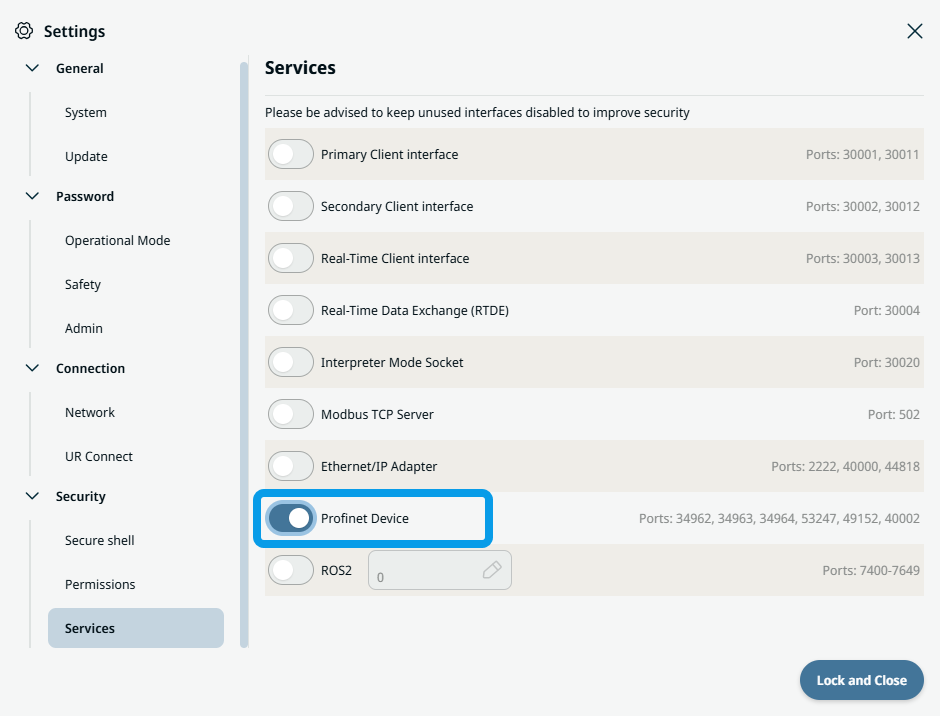
PROFIsafe を設定して使用するには、セキュリティサービス設定メニューで [Profinet デバイス] を有効にする必要があります。
 詳細および「Profinet」のインターフェース位置については、こちらをご覧ください。
|