Limite di coppia di serraggio del polso
| Descrizione |
Limite coppia di serraggio polso è un'impostazione che abilita o disabilita la limitazione della coppia massima di serraggio per i giunti del polso del robot. La limitazione è abilitata per impostazione predefinita. Questa funzione di sicurezza limita la coppia applicabile da parte del polso in fase di spinta.
|
|
Dettagli del limite di coppia di serraggio del polso |
Quando questa funzione è abilitata, il robot limita la coppia nei giunti del polso per impedire il serraggio tra polso, carico utile e braccio inferiore del robot. Quando l'impostazione è abilitata, definisce anche un limite superiore non classificato come sicuro per le finestre di coppia applicata dei giunti di base, spalla e gomito. Nelle applicazioni di controllo della forza, le forze di contatto conseguibili possono essere significativamente inferiori alle forze specificate nelle funzioni di sicurezza Limite forza utensile e Limite forza gomito.
Quando questa funzione è disabilitata, il robot può utilizzare una maggiore forza di spinta con i giunti del polso, ad esempio applicazioni con controllo della forza. Quando la funzione è disabilitata, i rischi di serraggio tra polso, carico utile e braccio inferiore del robot devono essere mitigati con altri mezzi. Questa funzione di sicurezza è abilitata su tutti i robot per impostazione predefinita. In PolyScope X versione 10.12 e versioni successive, è possibile disattivare questa funzione di sicurezza.
|
|
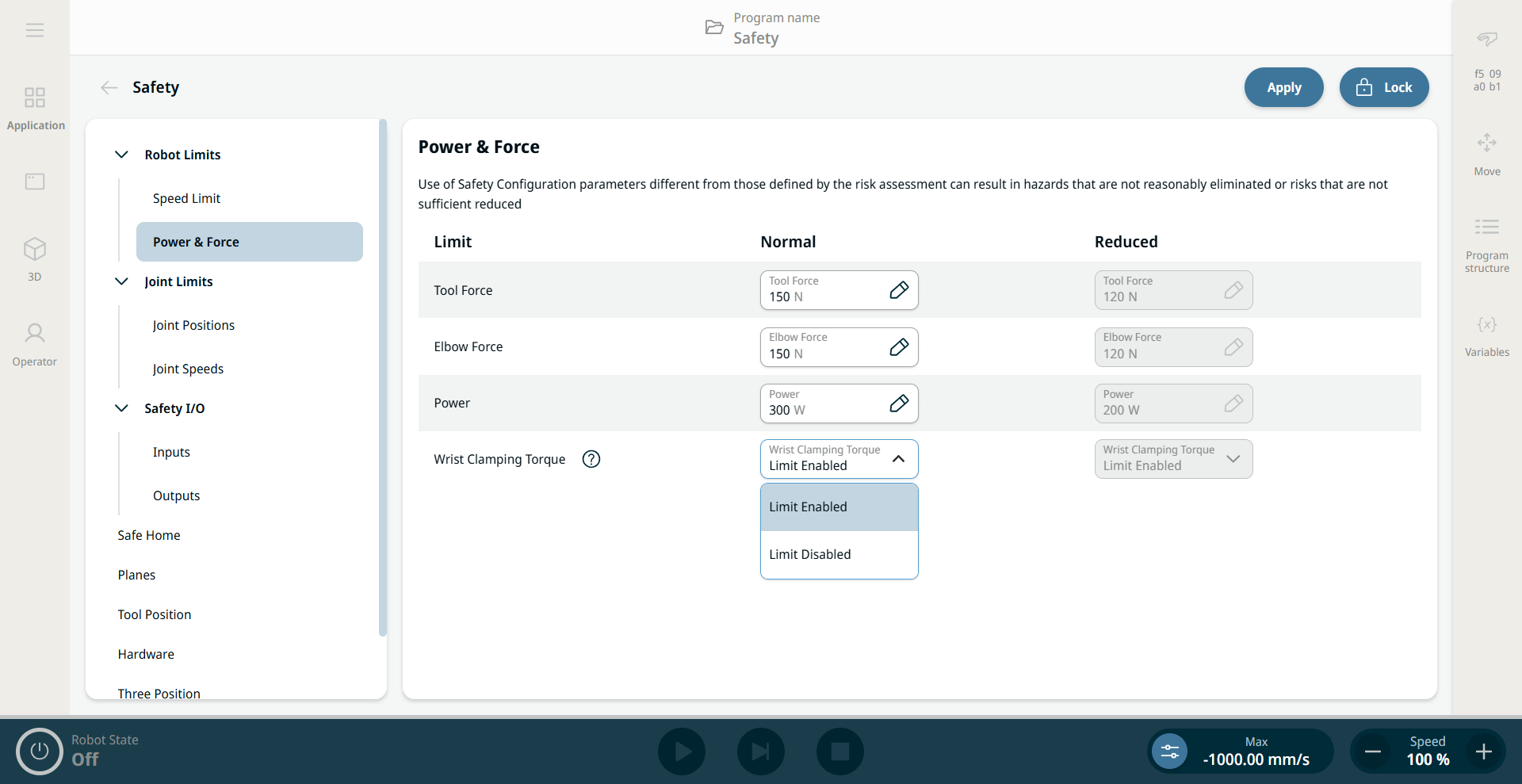
Abilitare e disabilitare il limite della coppia di serraggio del polso |
|