Bras du robot
| À propos du bras du robot |
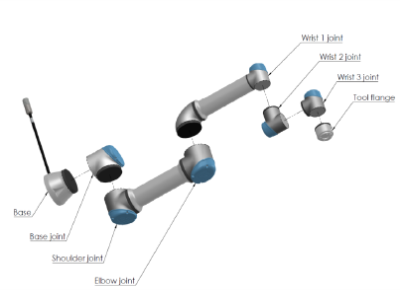
Les articulations, la base et la bride d'outil sont les principaux composants du bras du robot. Le contrôleur coordonne le mouvement des articulations pour déplacer le bras du robot.
La fixation d'un effecteur final (outil) à la bride d'outil à l'extrémité du bras du robot permet au robot de manipuler une pièce de travail. Certains outils ont un but spécifique au-delà de la manipulation d'une pièce, par exemple, l'inspection pour CQ, l'application d'adhésifs et le soudage. |
|
Le robot est une machine partiellement assemblée et une déclaration d'incorporation est fournie à ce titre. Une évaluation des risques est requise pour chaque application de robot.
|